
Réalisation d’un asservissement de Zdrives
+2
Lapin44
Ptitbill
6 participants
Page 1 sur 2 • 1, 2 
- Message n° 1
 Ptitbill
Ptitbill- Messages : 104
Date d'inscription : 18/02/2021
 Réalisation d’un asservissement de Zdrives
Réalisation d’un asservissement de Zdrives
Sam 16 Nov - 12:52
Bonjour à tous,
En suivant les derniers échanges sur l’asservissement des Zdrives du canot de Chrisdau, je me suis rendu compte qu'il y aurait peut-être un moyen de réaliser une commande de Zdrives qui soit à la fois simple à réaliser, peu coûteuse et avec un fonctionnement quasi similaire aux "gros". Ça vous intéresse ? A priori, oui, aux vues des réactions que cela suscite.
Bon, je me lance...
Historique
Lorsque j'ai commencé le projet "Bratt", je l'ai fait par attirance esthétique pour les remorqueurs modernes. Je n'avais pas du tout conscience du fonctionnement des Zdrives et de leur manœuvrabilité sur 360°...et plus! Et c'est bien le "et plus" qui complique la tache.
La solution proposée par Lapin et optimisée par Crono est simple, peu couteuse et fonctionne très bien : 2 servos, quelques pignons et le tour est joué. Pas tout à fait ! Il faut rajouter un "masque" sur les manches de l’émetteur pour qu’ils tournent bien rond et que les servos ne fassent pas des nœuds dans le canot !
A l’époque, je n’ai pas retenu cette solution pour deux raisons :
1- La radio devient dédiée au pilotage de Zdrive ou oblige à bricoler à chaque fois que l'on veut piloter autre chose.
2- Les manches sont pris pour l'orientation des Zdrives et il faut donc mettre les "gaz" ailleurs... et être pianiste pour tout gérer !
Sans trop savoir ce que les autres ont fait avant, je suis parti du fonctionnement des "gros" et je me suis dit que le plus "ergonomique", serait d'utiliser un manche de radio par Zdrive avec les deux principes suivants :
1- Manche au neutre (au milieu), la direction vers laquelle je pousse le manche détermine la direction vers laquelle pousse le Zdrive.
2- Plus j'écarte le manche du centre plus ça pousse fort.
Je ne sais pas comment fonctionne le SEAPOD ou les autres systèmes, mais je pense que l'on doit tous arriver aux mêmes conclusions.
Sur le papier, c'est facile et pratique à utiliser. A mettre en œuvre, c'est un peu plus complexe.
Sans rentrer dans les détails, il faut convertir la position du manche qui se déplace de droite à gauche (voie 1) et de haut en bas (voie 2) en ordres pour le servomoteur d'orientation du Zdrive d’une part, et pour le contrôleur du moteur d’autre part. Pour les matheux, on passe de coordonnées cartésiennes (x,y) à des coordonnées polaires (un angle et une distance, comme sur un écran radar).
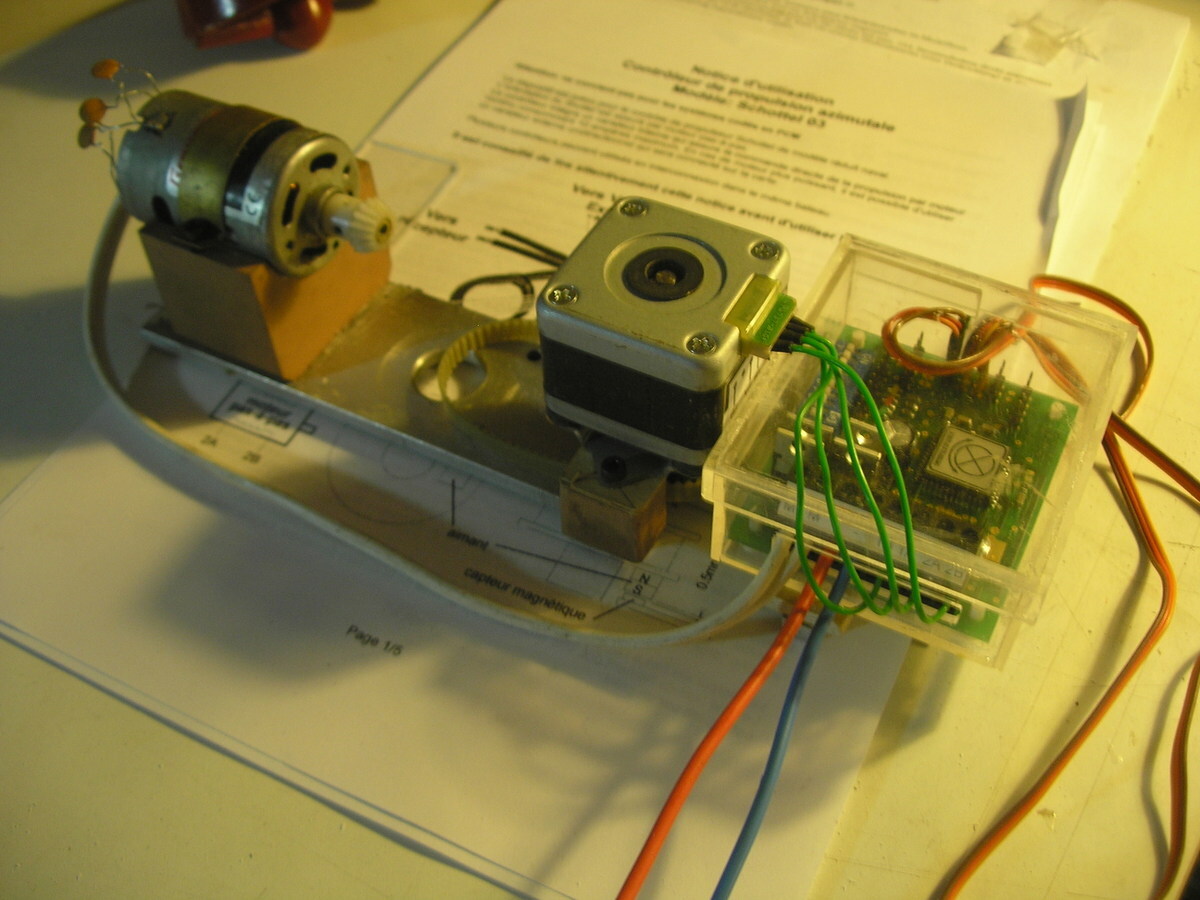
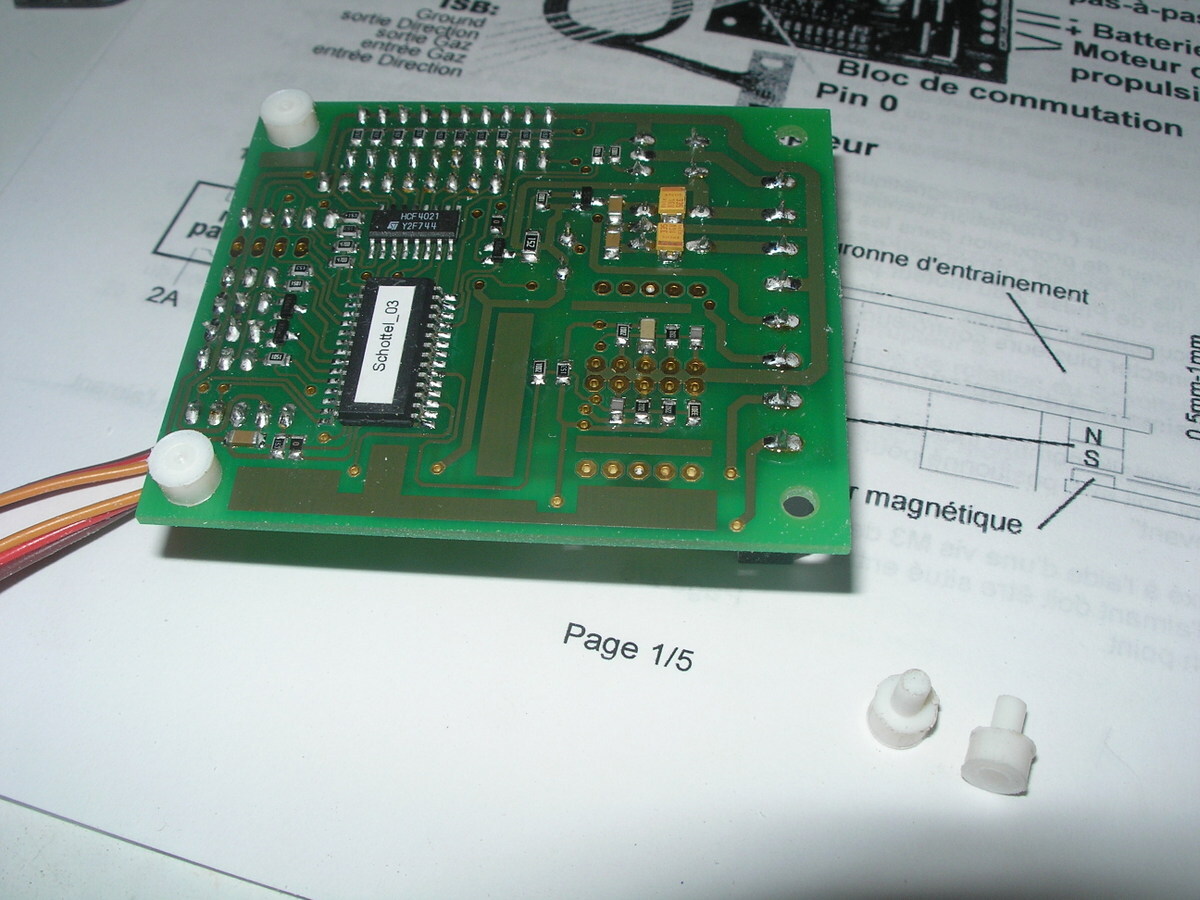
Étant plus à l'aise en programmation qu'en électronique, je suis parti sur la solution d'une carte ARDUINO (qui contient un programme informatique) et d'un moteur pas à pas indexé qui tourne très précisément sur 360° (et plus !) en connaissant, en permanence, sa position angulaire par rapport à l'axe du bateau.

le dessous du moteur pas à pas avec le capteur de position:
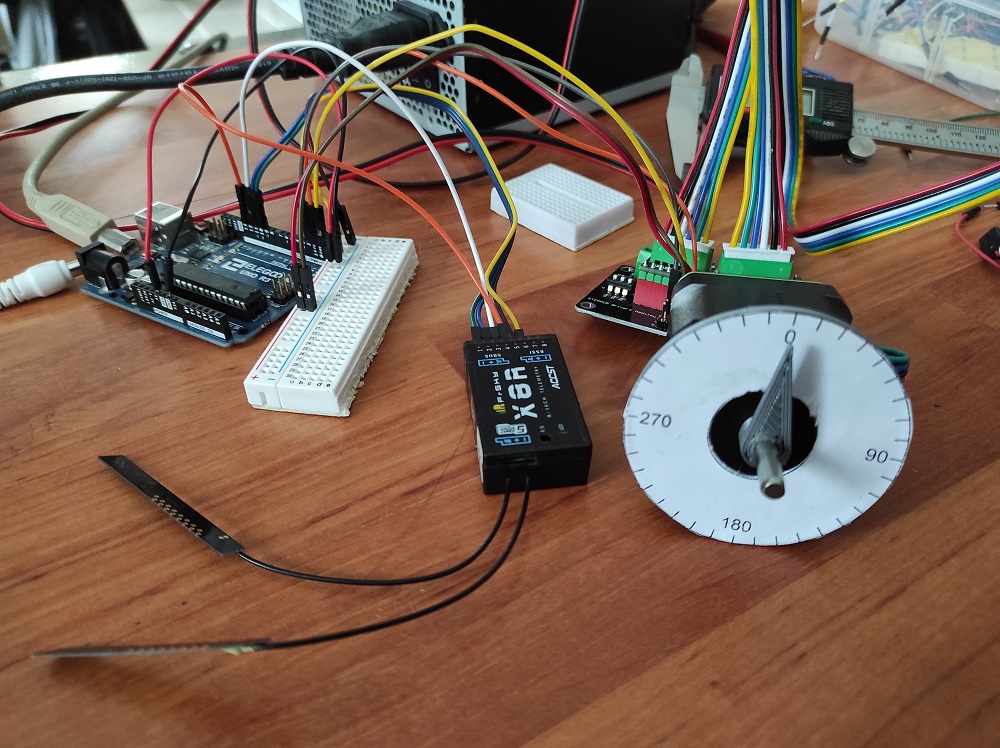
Montage de l'ensemble pour un test sur le bureau:

La platine radio du Bratt une fois que tout est "rangé" ....mais quel boulot pour en arriver là :
:
Ça fonctionne...mais c'est une une usine à gaz... avec un vrai plat de spaghetti pour câbler les éléments entre eux ! L'ensemble est difficile à reproduire par le commun des modélistes et les moteurs pas à pas sont encombrants et assez chers.
En suivant les derniers échanges sur l’asservissement des Zdrives du canot de Chrisdau, je me suis rendu compte qu'il y aurait peut-être un moyen de réaliser une commande de Zdrives qui soit à la fois simple à réaliser, peu coûteuse et avec un fonctionnement quasi similaire aux "gros". Ça vous intéresse ? A priori, oui, aux vues des réactions que cela suscite.
Bon, je me lance...
Historique
Lorsque j'ai commencé le projet "Bratt", je l'ai fait par attirance esthétique pour les remorqueurs modernes. Je n'avais pas du tout conscience du fonctionnement des Zdrives et de leur manœuvrabilité sur 360°...et plus! Et c'est bien le "et plus" qui complique la tache.
La solution proposée par Lapin et optimisée par Crono est simple, peu couteuse et fonctionne très bien : 2 servos, quelques pignons et le tour est joué. Pas tout à fait ! Il faut rajouter un "masque" sur les manches de l’émetteur pour qu’ils tournent bien rond et que les servos ne fassent pas des nœuds dans le canot !
A l’époque, je n’ai pas retenu cette solution pour deux raisons :
1- La radio devient dédiée au pilotage de Zdrive ou oblige à bricoler à chaque fois que l'on veut piloter autre chose.
2- Les manches sont pris pour l'orientation des Zdrives et il faut donc mettre les "gaz" ailleurs... et être pianiste pour tout gérer !
Sans trop savoir ce que les autres ont fait avant, je suis parti du fonctionnement des "gros" et je me suis dit que le plus "ergonomique", serait d'utiliser un manche de radio par Zdrive avec les deux principes suivants :
1- Manche au neutre (au milieu), la direction vers laquelle je pousse le manche détermine la direction vers laquelle pousse le Zdrive.
2- Plus j'écarte le manche du centre plus ça pousse fort.
Je ne sais pas comment fonctionne le SEAPOD ou les autres systèmes, mais je pense que l'on doit tous arriver aux mêmes conclusions.
Sur le papier, c'est facile et pratique à utiliser. A mettre en œuvre, c'est un peu plus complexe.
Sans rentrer dans les détails, il faut convertir la position du manche qui se déplace de droite à gauche (voie 1) et de haut en bas (voie 2) en ordres pour le servomoteur d'orientation du Zdrive d’une part, et pour le contrôleur du moteur d’autre part. Pour les matheux, on passe de coordonnées cartésiennes (x,y) à des coordonnées polaires (un angle et une distance, comme sur un écran radar).
Étant plus à l'aise en programmation qu'en électronique, je suis parti sur la solution d'une carte ARDUINO (qui contient un programme informatique) et d'un moteur pas à pas indexé qui tourne très précisément sur 360° (et plus !) en connaissant, en permanence, sa position angulaire par rapport à l'axe du bateau.
le dessous du moteur pas à pas avec le capteur de position:
Montage de l'ensemble pour un test sur le bureau:
La platine radio du Bratt une fois que tout est "rangé" ....mais quel boulot pour en arriver là
:Ça fonctionne...mais c'est une une usine à gaz... avec un vrai plat de spaghetti pour câbler les éléments entre eux ! L'ensemble est difficile à reproduire par le commun des modélistes et les moteurs pas à pas sont encombrants et assez chers.
- Message n° 2
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Sam 16 Nov - 12:55
On continue...
L’idée
En suivant les derniers post relatifs au canot de Chrisdau, j'ai suivi les discussions sur le montage des servos d'orientations du Zdrive suivant la recette de Lapin et Crono en me disant qu'il fallait vraiment que je me remette au boulot sur mon bateau ! Et là, révélation ! Pourquoi ne pas mixer nos deux solutions afin d'obtenir quelque chose de simple à mettre en œuvre et à utiliser sans pour autant hypothéquer sa maison ou faire appel à un ingénieur en physique nucléaire…
A savoir :
Adopter les deux servos de Lapin accouplés au Zdrive pour le faire pivoter plutôt que le moteur pas à pas trop complexe.
Supprimer le masque sur le manche de l’émetteur afin qu'il puisse servir pour n'importe quelle autres applications.
Glisser une carte ARDUINO entre le récepteur et les servos/contrôleurs moteurs pour substituer informatiquement le masque de l’émetteur et ajouter la fonction « gaz » directement sur les manches.
Bref, passer du système « LACROLU » (de LApin, CROno et LUcien) au système « LACROLUBIL »… Bon d’accord ! Si ça ne vous plait pas, on peut trouver autre chose !
Petite plus-value au passage : Tous ceux qui utilise déjà le système à deux servos pourrons très simplement faire l’upgrade.
Deuxième plus-value : La carte peut servir à plein d’autres choses : allumage des feux ou du treuil, animation d’une grue, détection d'eau à bord, animation de l’écran radar sur la passerelle...allez jeter un œil sur youtube, c’est impressionnant les trucs inutiles et débiles que l’on peu faire avec !
Troisième plus-value : Ça va m'obliger à me secouer et à remettre le chantier du Bratt en route !
Financièrement, une carte arduino, ça chercher dans les 10-20€ selon les modèles et on peut commander deux (voir plus) Zdrives avec une seule carte. Avec les 4 servos et les pignons, on arrive à une cinquantaine d’euros pour orienter deux propulseurs.
Coté réalisation électronique, ce n'est pas plus compliquée que de souder des feux de navigation.
Et enfin, charger mon programme sur une carte ARDUINO est à la porté de tout utilisateur d'ordinateur... au pire, on peut demander de l’aide aux copains.
Bon, je monte deux servos sur une platine, je tente de les faire tourner en rond sans faire de nœuds dans les biellettes et je vous explique la suite…
L’idée
En suivant les derniers post relatifs au canot de Chrisdau, j'ai suivi les discussions sur le montage des servos d'orientations du Zdrive suivant la recette de Lapin et Crono en me disant qu'il fallait vraiment que je me remette au boulot sur mon bateau ! Et là, révélation ! Pourquoi ne pas mixer nos deux solutions afin d'obtenir quelque chose de simple à mettre en œuvre et à utiliser sans pour autant hypothéquer sa maison ou faire appel à un ingénieur en physique nucléaire…
A savoir :
Adopter les deux servos de Lapin accouplés au Zdrive pour le faire pivoter plutôt que le moteur pas à pas trop complexe.
Supprimer le masque sur le manche de l’émetteur afin qu'il puisse servir pour n'importe quelle autres applications.
Glisser une carte ARDUINO entre le récepteur et les servos/contrôleurs moteurs pour substituer informatiquement le masque de l’émetteur et ajouter la fonction « gaz » directement sur les manches.
Bref, passer du système « LACROLU » (de LApin, CROno et LUcien) au système « LACROLUBIL »… Bon d’accord ! Si ça ne vous plait pas, on peut trouver autre chose !
Petite plus-value au passage : Tous ceux qui utilise déjà le système à deux servos pourrons très simplement faire l’upgrade.
Deuxième plus-value : La carte peut servir à plein d’autres choses : allumage des feux ou du treuil, animation d’une grue, détection d'eau à bord, animation de l’écran radar sur la passerelle...allez jeter un œil sur youtube, c’est impressionnant les trucs inutiles et débiles que l’on peu faire avec !
Troisième plus-value : Ça va m'obliger à me secouer et à remettre le chantier du Bratt en route !
Financièrement, une carte arduino, ça chercher dans les 10-20€ selon les modèles et on peut commander deux (voir plus) Zdrives avec une seule carte. Avec les 4 servos et les pignons, on arrive à une cinquantaine d’euros pour orienter deux propulseurs.
Coté réalisation électronique, ce n'est pas plus compliquée que de souder des feux de navigation.
Et enfin, charger mon programme sur une carte ARDUINO est à la porté de tout utilisateur d'ordinateur... au pire, on peut demander de l’aide aux copains.
Bon, je monte deux servos sur une platine, je tente de les faire tourner en rond sans faire de nœuds dans les biellettes et je vous explique la suite…
- Message n° 3
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Sam 16 Nov - 13:12
Essais
Le gros du boulot étant sur le logiciel, je commence par réaliser rapidement une platine à essais avec deux servos et un Zdrive … en bois.
Je sais que la modification de Crono/Lucien est plus aboutie mais, pour le moment, seul le principe de base de Lapin m’intéresse.
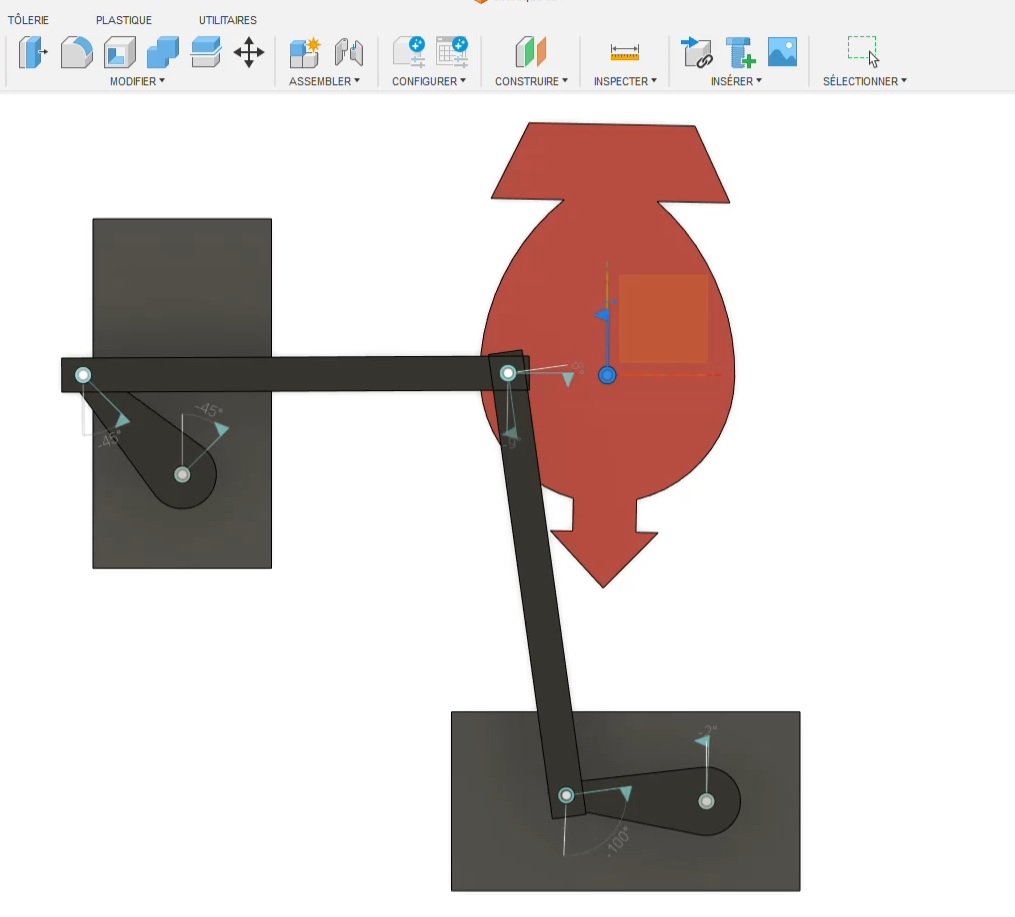
Le voici modélisé

Le même en vrai
Lapin nous a expliqué qu’il avait tâtonné pour trouver les dispositions, les débattements et les longueurs de biellettes sur ses premiers montages. Si certains d’entre vous galèrent aussi, je pourrais faire un petit tuto sur le traçage du système complet (en incluant les améliorations de Crono).
Cette aprèm… programmation ARDUINO...
Le gros du boulot étant sur le logiciel, je commence par réaliser rapidement une platine à essais avec deux servos et un Zdrive … en bois.
Je sais que la modification de Crono/Lucien est plus aboutie mais, pour le moment, seul le principe de base de Lapin m’intéresse.
Le voici modélisé
Le même en vrai
Lapin nous a expliqué qu’il avait tâtonné pour trouver les dispositions, les débattements et les longueurs de biellettes sur ses premiers montages. Si certains d’entre vous galèrent aussi, je pourrais faire un petit tuto sur le traçage du système complet (en incluant les améliorations de Crono).
Cette aprèm… programmation ARDUINO...
- Message n° 4
 Lapin44
Lapin44- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Sam 16 Nov - 13:34
Bonjour Pitt bill
L' inconvénient des gaz sur le manche, ( IMTH et KAGELMACHER ) était le manque de précision dans la gestion des manoeuvres a basses vitesses, En Général ,tu regle tes régimes moteurs une fois pour tout, au régime constant choisi, et tu gére ta vitesse et déplacement en latéral et direction en jouant sur l'orientation des propulseurs
Il faut un point de repére pour le capteur du zéro
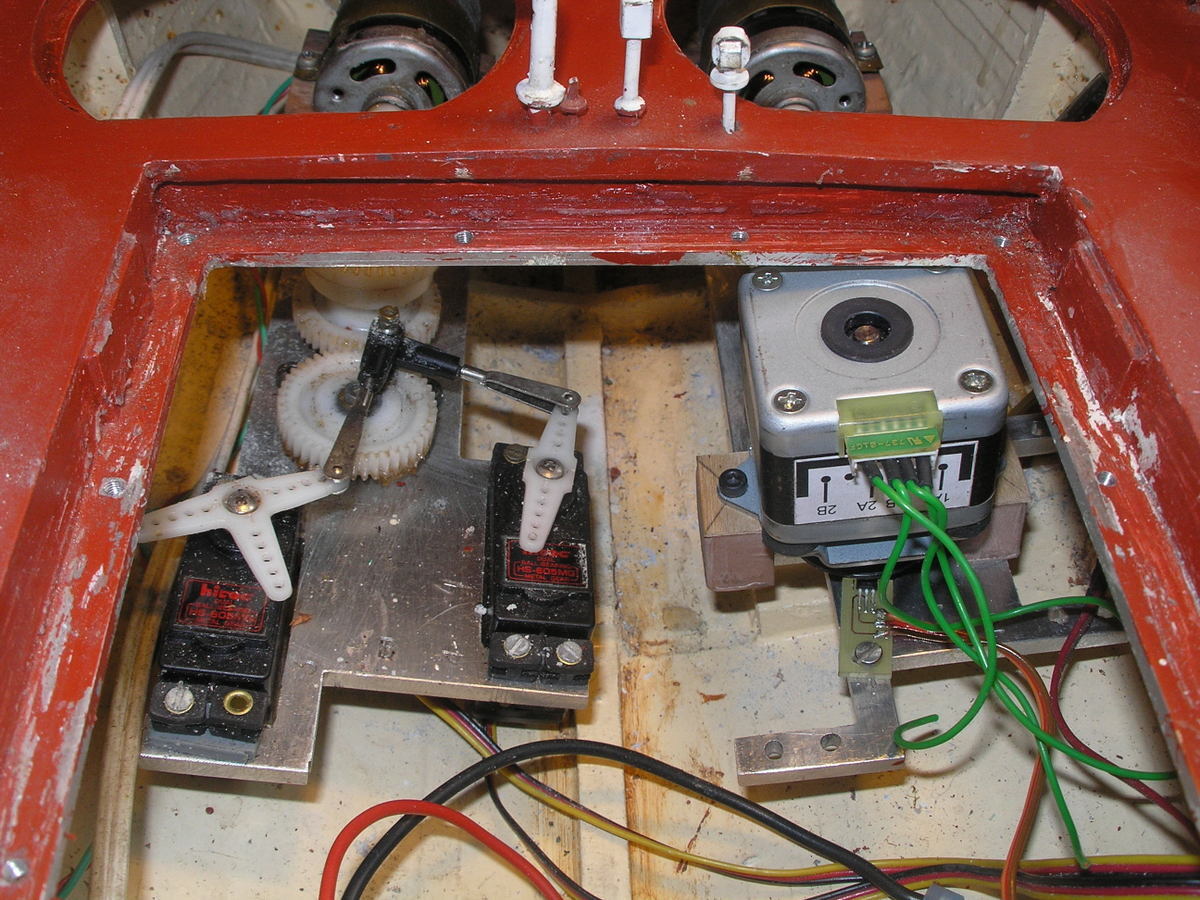
On voit bien sous le gros moteur pas a pas le capteur du zéro ,Le petit aimant est collé sous la poulie , petit aimant ,qui, un jour s'est décollé et le systeme paumé dans son orientation, démontage du bazar, recollé l'aimant et remontage
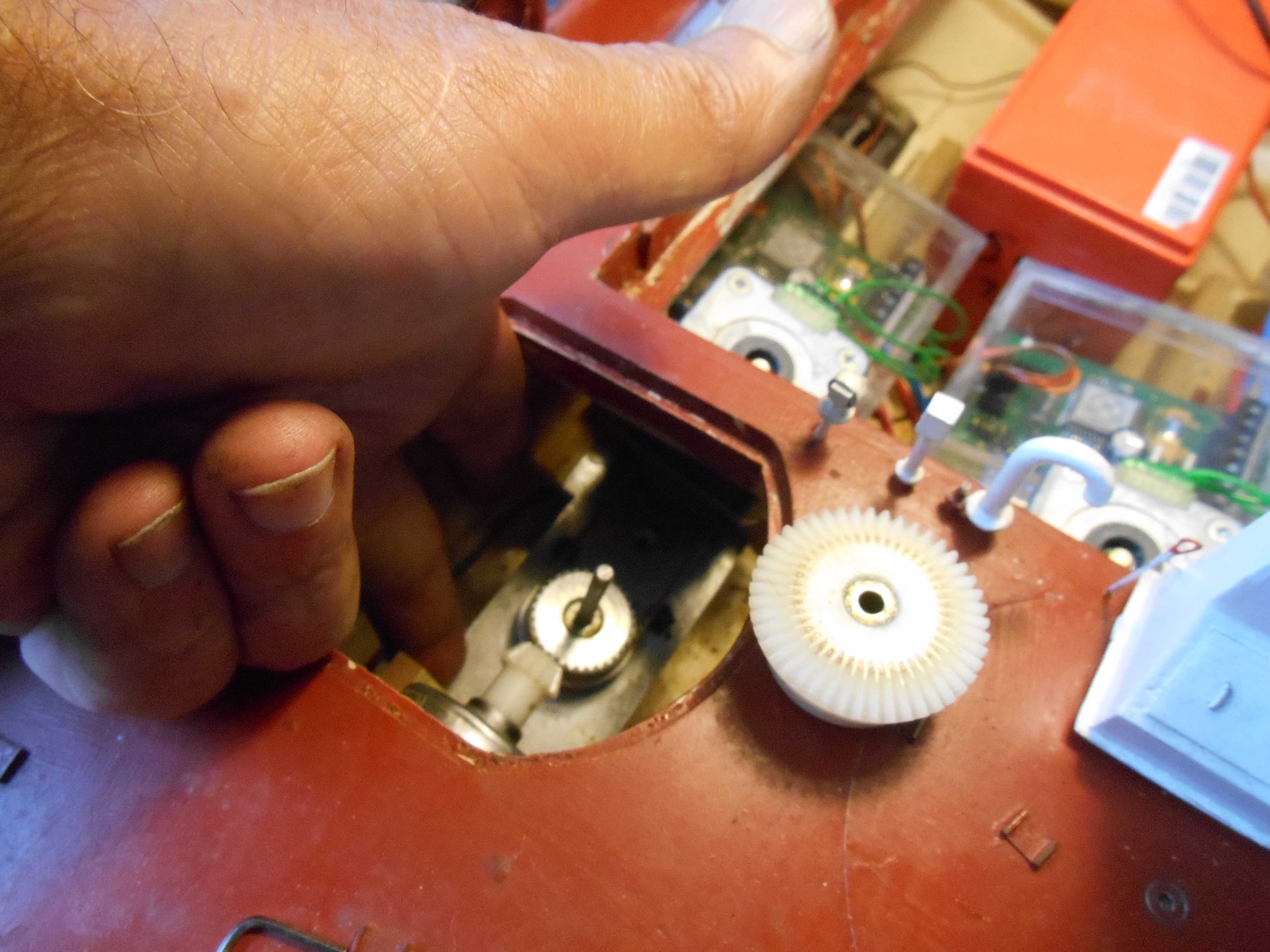
L'accessibilité est plus que limite pour les réparations
En résumé , cette carte électronique est semblable aux cartes KAGELMACHER ET DU seapod de PATRICK, sauf que le Seapod et Imth ,utilise un servo modifié ,suppression de la butée du pignon de sortie et blocage du potentiométre pile au neutre et suppression de son entrainement; Ton systeme utilise un moteur pas a pas comme Kagelmacher
Carte Kagelmacher
Pour valider ton montage ,propose le a Chrisdau ,et a Sismique ,ce qui ferait un excellent banc d'essai et peut etre ouvrir une voie pour d'autres d'autres modélistes intérressés par les zdrives.
L' inconvénient des gaz sur le manche, ( IMTH et KAGELMACHER ) était le manque de précision dans la gestion des manoeuvres a basses vitesses, En Général ,tu regle tes régimes moteurs une fois pour tout, au régime constant choisi, et tu gére ta vitesse et déplacement en latéral et direction en jouant sur l'orientation des propulseurs
Il faut un point de repére pour le capteur du zéro

On voit bien sous le gros moteur pas a pas le capteur du zéro ,Le petit aimant est collé sous la poulie , petit aimant ,qui, un jour s'est décollé et le systeme paumé dans son orientation, démontage du bazar, recollé l'aimant et remontage

L'accessibilité est plus que limite pour les réparations
En résumé , cette carte électronique est semblable aux cartes KAGELMACHER ET DU seapod de PATRICK, sauf que le Seapod et Imth ,utilise un servo modifié ,suppression de la butée du pignon de sortie et blocage du potentiométre pile au neutre et suppression de son entrainement; Ton systeme utilise un moteur pas a pas comme Kagelmacher


Carte Kagelmacher
Pour valider ton montage ,propose le a Chrisdau ,et a Sismique ,ce qui ferait un excellent banc d'essai et peut etre ouvrir une voie pour d'autres d'autres modélistes intérressés par les zdrives.
- Message n° 5
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 9:31
Bonjour,
Je n’avais pas vraiment de doutes, mais le pilotage des deux servos par la carte Arduino fonctionne… et ça tourne aussi rond que le montage « à l’arrache » et les servos bas de gamme le permettent.
Reste, maintenant à le coupler à la radio.
Franck
Je n’avais pas vraiment de doutes, mais le pilotage des deux servos par la carte Arduino fonctionne… et ça tourne aussi rond que le montage « à l’arrache » et les servos bas de gamme le permettent.
Reste, maintenant à le coupler à la radio.
Franck
- Message n° 6
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 9:43
Bonjour Pittbill
Donc les deux servos sont asservis par la carte. Il n'y a plus besoin du masque sur l'émetteur ? Tu propose ton montage a Chrisdau, qui est en train de faire naufrage, discute en avec lui pour qu'il les installe dans son Croisic
Michel
Donc les deux servos sont asservis par la carte. Il n'y a plus besoin du masque sur l'émetteur ? Tu propose ton montage a Chrisdau, qui est en train de faire naufrage, discute en avec lui pour qu'il les installe dans son Croisic
Michel
- Message n° 7
 chrisdau
chrisdau- Messages : 240
Date d'inscription : 09/05/2020
Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 10:31
bonjour tous, je regarde attentivement les développement pour notre z drive , je viens de découvrir sur les boutiques robotique des accessoires permettant d'asservir les servos de 6 a 12 pour nos récepteurs , il faut savoir que tous nos servos peuvent tourner de 90 a 360 simplement en retirant la petite goupille mécanique des servos, maintenant en utilisant un asserviseur de servos pour pouvez regler le neutre voir les vidiéos , je viens de commander ce petit module pour faire des essais, je garde pour l'instant l'option des deux servos engrenages de crono voir même de fixer les deux engrenages sur les servos et reculer l'engrenage de direction sur une platine
amicalement a tous
https://eu.robotshop.com/fr/products/tuner-voyage-servo
amicalement a tous
https://eu.robotshop.com/fr/products/tuner-voyage-servo
- Message n° 8
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 10:36
chrisdau a écrit:bonjour tous, je regarde attentivement les développement pour notre z drive , je viens de découvrir sur les boutiques robotique des accessoires permettant d'asservir les servos de 6 a 12 V pour nos récepteurs , il faut savoir que tous nos servos peuvent tourner de 90 a 360 simplement en retirant la petite goupille mécanique des servos, maintenant en utilisant un asserviseur de servos pour pouvez regler le neutre voir les vidiéos , je viens de commander ce petit module pour faire des essais, je garde pour l'instant l'option des deux servos engrenages de crono voir même de fixer les deux engrenages sur les servos et reculer l'engrenage de direction sur une platine
amicalement a tous
https://eu.robotshop.com/fr/products/tuner-voyage-servo
https://eu.robotshop.com/fr/collections/controleurs-servomoteur
- Message n° 9
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 11:28
Bonjour Chrisdau,
Faire tourner un servo à 360° ou le démultiplier pour qu'il fasse tourner le zdrive sur 360° n'est pas un problème. LE problème, c'est le "360° ET PLUS".
Si tu veux faire plusieurs tours avec un servo standard, c'est le potentiomètre qui va bloquer. il est généralement limité à 180°.
Un potentiometre qui tourne à 360° (sans arrêt), c'est cher et volumineux... et je ne sais pas comment réagit l'électronique du servo quand il fini un tour complet et que sa valeur passe de sa valeur maximum à 0, d'un seul coup.
Je reviendrais la dessus après avoir fini le logiciel.
Franck
Faire tourner un servo à 360° ou le démultiplier pour qu'il fasse tourner le zdrive sur 360° n'est pas un problème. LE problème, c'est le "360° ET PLUS".
Si tu veux faire plusieurs tours avec un servo standard, c'est le potentiomètre qui va bloquer. il est généralement limité à 180°.
Un potentiometre qui tourne à 360° (sans arrêt), c'est cher et volumineux... et je ne sais pas comment réagit l'électronique du servo quand il fini un tour complet et que sa valeur passe de sa valeur maximum à 0, d'un seul coup.
Attention, tu ne peux pas mettre les pignons directement sur les servos. Il faut obligatoirement passer par un chape à boule (ou équivalent). Par contre, tu peux mettre une courroie crantée entre le pignon et le zdrive pour que tes servos soient plus accessibles.
je garde pour l'instant l'option des deux servos engrenages de crono voir même de fixer les deux engrenages sur les servos et reculer l'engrenage de direction sur une platine
Je reviendrais la dessus après avoir fini le logiciel.
Franck
- Message n° 10
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
Réalisation d’un asservissement de Zdrives 3 participants
Dim 17 Nov - 12:09
bonjour tous
merci ptitbill j'ai prevu de fabriquer des chappes spéciales avec mon tour les têtes des engrenages de servos font 4 mm de hauteur et 6mm de diametre , attention quand je parles de courroies je parles en nombre de crans , j'ai la possibilité de tout faire, exemple 18 dents 36 avec la conception des poulies , par exemple 90 degres vers 180 et 180 et plus pour installer ton systeme je suis obligé de reculer ou déporter l'engrenage de direction ou utiliser une courroies crante sur la platine arriere du croisic , mais tu as raison pour le callage du 360 degres, reste avoir avec un regulateur de servos
amicalement
merci ptitbill j'ai prevu de fabriquer des chappes spéciales avec mon tour les têtes des engrenages de servos font 4 mm de hauteur et 6mm de diametre , attention quand je parles de courroies je parles en nombre de crans , j'ai la possibilité de tout faire, exemple 18 dents 36 avec la conception des poulies , par exemple 90 degres vers 180 et 180 et plus pour installer ton systeme je suis obligé de reculer ou déporter l'engrenage de direction ou utiliser une courroies crante sur la platine arriere du croisic , mais tu as raison pour le callage du 360 degres, reste avoir avec un regulateur de servos
amicalement
- Message n° 11
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 13:28
Sur Le systéme IMTH , qui utilise un servo classique. La butée du pignon de sortie est arasée, ,le potentiometre est calé a son neutre bloqué par une goutte de colle et son entrainement supprimé, C'est ce qui est inscrit dans le cahier IMTH
- Message n° 12
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 13:47
Ok Michel. Mais dans ce cas, sans électronique supplémentaire, tu perds la relation entre la position du manche et la position du zdrive.
Franck
Franck
- Message n° 13
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 14:46
oui ,mais il y a la carte IMTH
Je crois comprendre que Chrisdau, veut attaquer directement le zdrive ,mais comme il y a le fut du propulseur , il y a pensé remplacer les bielles par des courroies N'empeche que les servos doivent etre a 90° l'un par rapport a l'autre et travailler sur les deux fois 45 ° de leur débattement, comme sur la vidéo et avoir des poulies identiques sur le propulseur et les servos
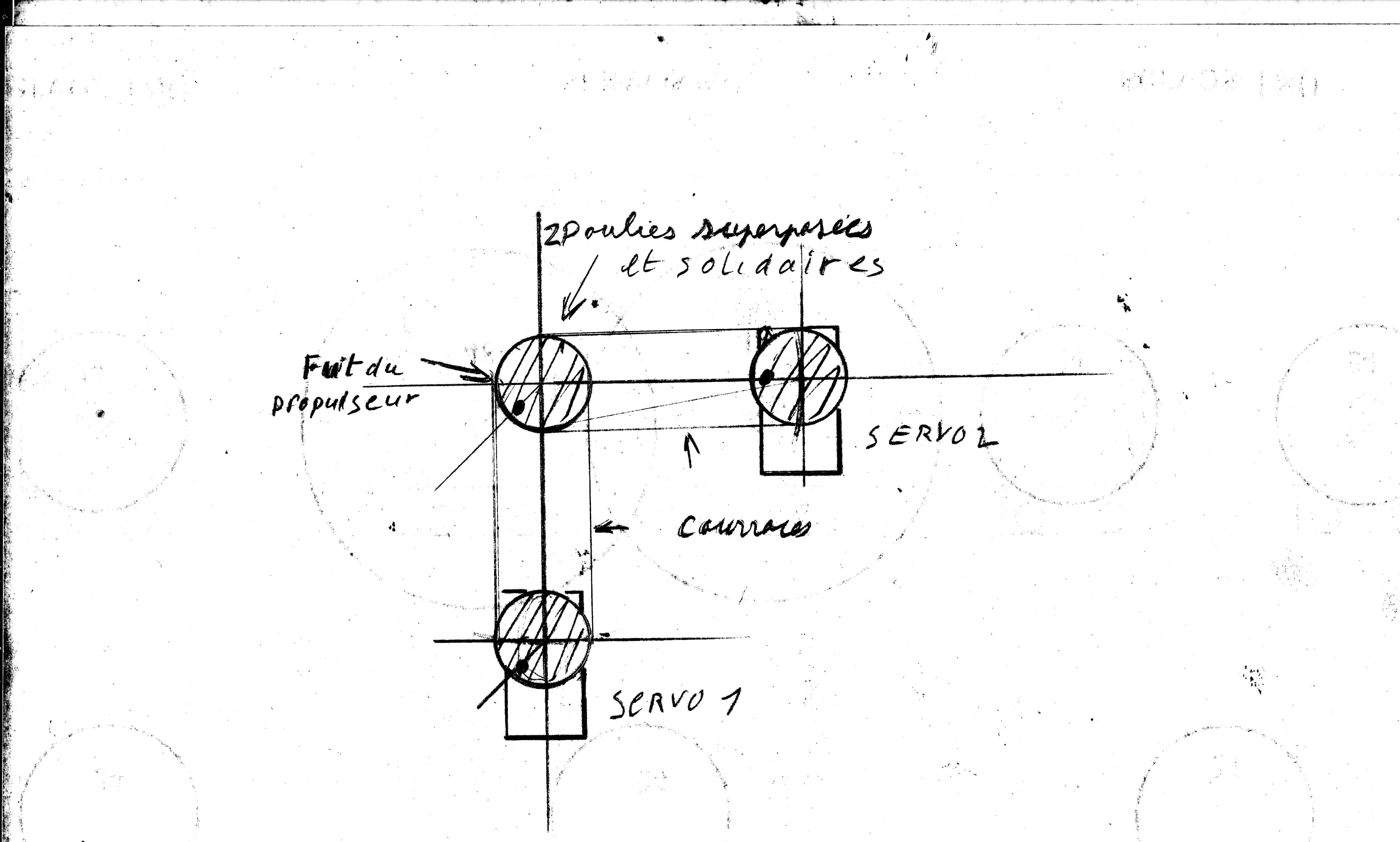
Servos de 90 ° de débattement. L'ajustage des points morts pourra se faire avec le petit module montré plus haut Les points sur les poulies représentent la position de calage
Je crois comprendre que Chrisdau, veut attaquer directement le zdrive ,mais comme il y a le fut du propulseur , il y a pensé remplacer les bielles par des courroies N'empeche que les servos doivent etre a 90° l'un par rapport a l'autre et travailler sur les deux fois 45 ° de leur débattement, comme sur la vidéo et avoir des poulies identiques sur le propulseur et les servos

Servos de 90 ° de débattement. L'ajustage des points morts pourra se faire avec le petit module montré plus haut Les points sur les poulies représentent la position de calage
- Message n° 14
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 16:33
Bonsoir à tous,
Fin de weekend et après quelques biellettes cassées (je les imprime par paquets) le temps de faire tourner les servos dans le bon sens, les premiers résultats sont là. Ça obéit au doigt et à l’œil... enfin surtout au doigt...
Le montage de test à trop de jeu pour pouvoir fignoler les réglages donc... il faut réaliser les platines définitives du bateau.
A bientôt pour la suite...
Franck
Fin de weekend et après quelques biellettes cassées (je les imprime par paquets) le temps de faire tourner les servos dans le bon sens, les premiers résultats sont là. Ça obéit au doigt et à l’œil... enfin surtout au doigt...
Le montage de test à trop de jeu pour pouvoir fignoler les réglages donc... il faut réaliser les platines définitives du bateau.
A bientôt pour la suite...
Franck
- Message n° 15
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 17:40
C' est trés bien ,que pense tu de mon croquis ci dessus ? Pour un tracteur, cela ne pause pas de probleme parce qu'il y a de place. Par contre sur un ASD ou la hauteur sous barrot est trés limite. Comme tu dis ,Chrisdau devra reporter ton montage vers un endroit plus creux et faire la liaison controleur drive par une courroie. Sur ton montage ,il n'y a plus besoin de "masque" sur les manches?

- Message n° 16
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Dim 17 Nov - 20:25
Bonsoir Michel,

L'erreur que vous faites, c'est de considérer un servo comme un actionneur qui travail en rotation. Les servos qui fonctionnent sur +/-45° génèrent des mouvements (quasi) linéaires.
L'analogie que tu avais fais avec un moteur est parfaite. Le piston (comme nos servos) fonctionne de façon linéaire, de haut en bas. Le vilebrequin (comme l'axe du zdrive) fonctionne en rotation.

Les moteurs monocylindre passe par deux points morts lorsque la bielle du piston pousse dans l'axe du vilebrequin (en haut et en bas de la course du piston). Sur une tondeuse qui tourne toujours dans le même sens, c'est l'inertie qui permet de passer ces points morts. Sur une machine à vapeur (ou sur notre montage à servos), il faut pouvoir tourner lentement et, surtout, pouvoir inverser la marche.
Si le piston (ou le servo) s'arrête sur un point mort, soit tout se bloque (c'est comme ça que j'ai cassé les biellettes) soit il risque de repartir dans le mauvais sens.

Un deuxième cylindre (ou servo) avec des points morts différents de l'autre et relié au même vilebrequin, résout le problème.
Comme ton montage est basé sur le mouvement du manche de l'émetteur dans le masque rond et que les deux voies (horizontale et verticale) sont à 90°, les servos, dans le bateau, doivent aussi être montés à 90°.
Dans mon cas, comme je n'ai plus de masque, je pourrais choisir n'importe quel angle (sauf 0° et 180° pour ne pas avoir les même points morts que l'autre servo). Mais je vais conserver 90° pour le montage : c'est beaucoup plus facile à réaliser que si j'utilise 12.58°
Franck
Non, c'était le but du jeu !Sur ton montage ,il n'y a plus besoin de "masque" sur les manches?
Oui, c'est ça. En utilisant des courroies assez longues, tu peux déplacer la "mécanique" vers le centre du bateau, la où il y a plus de place pour les doigts.Pour un tracteur, cela ne pause pas de probleme parce qu'il y a de place. Par contre sur un ASD ou la hauteur sous barrot est trés limite. Comme tu dis ,Chrisdau devra reporter ton montage vers un endroit plus creux et faire la liaison controleur drive par une courroie.
Deux poulies crantées sur l'axe du zdrive, ça ne marche pasque pense tu de mon croquis ci dessus ?
L'erreur que vous faites, c'est de considérer un servo comme un actionneur qui travail en rotation. Les servos qui fonctionnent sur +/-45° génèrent des mouvements (quasi) linéaires.
L'analogie que tu avais fais avec un moteur est parfaite. Le piston (comme nos servos) fonctionne de façon linéaire, de haut en bas. Le vilebrequin (comme l'axe du zdrive) fonctionne en rotation.
Les moteurs monocylindre passe par deux points morts lorsque la bielle du piston pousse dans l'axe du vilebrequin (en haut et en bas de la course du piston). Sur une tondeuse qui tourne toujours dans le même sens, c'est l'inertie qui permet de passer ces points morts. Sur une machine à vapeur (ou sur notre montage à servos), il faut pouvoir tourner lentement et, surtout, pouvoir inverser la marche.
Si le piston (ou le servo) s'arrête sur un point mort, soit tout se bloque (c'est comme ça que j'ai cassé les biellettes) soit il risque de repartir dans le mauvais sens.
Un deuxième cylindre (ou servo) avec des points morts différents de l'autre et relié au même vilebrequin, résout le problème.
Comme ton montage est basé sur le mouvement du manche de l'émetteur dans le masque rond et que les deux voies (horizontale et verticale) sont à 90°, les servos, dans le bateau, doivent aussi être montés à 90°.
Dans mon cas, comme je n'ai plus de masque, je pourrais choisir n'importe quel angle (sauf 0° et 180° pour ne pas avoir les même points morts que l'autre servo). Mais je vais conserver 90° pour le montage : c'est beaucoup plus facile à réaliser que si j'utilise 12.58°
Franck
- Message n° 17
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 9:40
Bonjour Ptitbill
C'est parfait , bon pour mise en fabrication
Michel
C'est parfait , bon pour mise en fabrication
Michel
- Message n° 18
 xtian29
xtian29- Messages : 1469
Date d'inscription : 04/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 12:50
Hello 
Première chose je suis content que quelqu'un écrive enfin
Et ce schéma est un mécanisme au mieux complètement bloqué et au pire c'est un "grille servo" !

La solution Ardino pour le "360° et plus" est séduisante, c'est marrant à voir les photos avec le banc de test et le moteur pas à pas son cadran à degrés, je pense immédiatement à Philippe Loussouarn (le Sorcier du 22) qui avait proposé une solution similaire puis pris par son boulot a un peu abandonné le modélisme.
Bref le 360° et plus LaCroLuBill est bien sympathique.
Je serais plus réservé pour la partie puissance au stick. En effet avec Patrick et son Seapod c'est une option qui était possible, on avait l'impression que ça marchait bien avec les stick "libres" en restant un tant soit peu à un angle de puissance constant.
Du coup Patrick a fait une poignée genre IMTH qui permet de garder l'angle de puissance constant du stick tout au long d'un 360° pour la direction et puis là : pas-glop pas-glop la puissance n'était pas constante malgré l'angle constant - le signal n'étant pas constant quand on garde le même angle de puissance mais avec une direction à 0°, 30°, 180° ou 270°. Sur papier en X/Y là on devrait avoir un cercle on obtient une patate. Je pense que ça vient du fait que les deux axes des manches X et Y ne sont pas (et ne peuvent pas) être sur un même plan, un des axe est en dessous de l'autre, et avec le faible débattement angulaire des manches c'est finalement plus important qu'on le croit, et puis il y a des problèmes de non similarité exacte des potards, peut-être aussi de trim, etc ... Bref ça ne marche pas !
IMTH dans sa dernière version aurait solutionné ce problème par une correction du signal. Si j'ai bien compris Martin qui les utilise sur son Smit, il a du faire une calibration angle par angle sur un 360° pour que ce signal soit quasiment constant "la patate s'arrondi au mieux possible "- Ca fonctionnait très bien pour un des manches X-Y propulseur mais c'était pas encore au point pour le second. Connaissant la maitrise et le perfectionnisme de Martin je ne doute pas que son système sera parfait après une calibration scrupuleuse.
Mais j'ai une seconde raison qui me pousse à ne avoir la puissance sur le manche X-Y. En fait en manœuvre dans la vraie vie il y a deux écoles, une première laisse les moteurs à vitesse constante et égale pour les deux moteurs tandis que l'on manœuvre à contre, on change la vitesse moteur que pour plus ou moins de traction demandée par le pilote. La seconde école est de dissocier assez couramment la vitesse moteur durant les manœuvres et on se retrouve à avoir parfois un moteur par exemple à 1/4 et l'autre à 3/4. Perso j'ai surtout pratiqué la première école, il faut savoir que dans certaines compagnies la seconde école est carrément proscrite pour des raisons de durée de vie des embrayages, de température d'huile d'embrayage qui déclenchent les alarmes, mais aussi d'usure des moteurs.
Pour la première école, celle que j'ai apprise, on ne dissocie que très rarement les puissances moteurs et que pour des cas particuliers comme par exemple lorsqu'on est en flèche dans une écluse !
Bref du coup moi le 360° au manche X-Y et puis un potard unique en haut à droite de ma radio pour les deux moteurs que je peux manipuler avec mon majeur tandis que mes index et pouces sont sur les sticks : ça me va parfaitement et je retrouve toutes les sensation de la manœuvre comme en vrai.
Pour Chrisdau, je suis désolé mais avec les courroies tu ne pourras sérieusement faire que du 30°/30° ce qui est largement suffisant pour la navigation dans le trèfle des Championnats de France. Pour le reste, du 180°/180° ..... pffffff ..... fait le si ça te plait mais ce sera d'une imprécision sans nom et une marche arrière idiote à devoir faire 350° à droite quand tu voudras faire 10° à gauche.
A+ Xtian
Première chose je suis content que quelqu'un écrive enfin
Et ce schéma est un mécanisme au mieux complètement bloqué et au pire c'est un "grille servo" !
La solution Ardino pour le "360° et plus" est séduisante, c'est marrant à voir les photos avec le banc de test et le moteur pas à pas son cadran à degrés, je pense immédiatement à Philippe Loussouarn (le Sorcier du 22) qui avait proposé une solution similaire puis pris par son boulot a un peu abandonné le modélisme.
Bref le 360° et plus LaCroLuBill est bien sympathique.
Je serais plus réservé pour la partie puissance au stick. En effet avec Patrick et son Seapod c'est une option qui était possible, on avait l'impression que ça marchait bien avec les stick "libres" en restant un tant soit peu à un angle de puissance constant.
Du coup Patrick a fait une poignée genre IMTH qui permet de garder l'angle de puissance constant du stick tout au long d'un 360° pour la direction et puis là : pas-glop pas-glop la puissance n'était pas constante malgré l'angle constant - le signal n'étant pas constant quand on garde le même angle de puissance mais avec une direction à 0°, 30°, 180° ou 270°. Sur papier en X/Y là on devrait avoir un cercle on obtient une patate. Je pense que ça vient du fait que les deux axes des manches X et Y ne sont pas (et ne peuvent pas) être sur un même plan, un des axe est en dessous de l'autre, et avec le faible débattement angulaire des manches c'est finalement plus important qu'on le croit, et puis il y a des problèmes de non similarité exacte des potards, peut-être aussi de trim, etc ... Bref ça ne marche pas !
IMTH dans sa dernière version aurait solutionné ce problème par une correction du signal. Si j'ai bien compris Martin qui les utilise sur son Smit, il a du faire une calibration angle par angle sur un 360° pour que ce signal soit quasiment constant "la patate s'arrondi au mieux possible "- Ca fonctionnait très bien pour un des manches X-Y propulseur mais c'était pas encore au point pour le second. Connaissant la maitrise et le perfectionnisme de Martin je ne doute pas que son système sera parfait après une calibration scrupuleuse.
Mais j'ai une seconde raison qui me pousse à ne avoir la puissance sur le manche X-Y. En fait en manœuvre dans la vraie vie il y a deux écoles, une première laisse les moteurs à vitesse constante et égale pour les deux moteurs tandis que l'on manœuvre à contre, on change la vitesse moteur que pour plus ou moins de traction demandée par le pilote. La seconde école est de dissocier assez couramment la vitesse moteur durant les manœuvres et on se retrouve à avoir parfois un moteur par exemple à 1/4 et l'autre à 3/4. Perso j'ai surtout pratiqué la première école, il faut savoir que dans certaines compagnies la seconde école est carrément proscrite pour des raisons de durée de vie des embrayages, de température d'huile d'embrayage qui déclenchent les alarmes, mais aussi d'usure des moteurs.
Pour la première école, celle que j'ai apprise, on ne dissocie que très rarement les puissances moteurs et que pour des cas particuliers comme par exemple lorsqu'on est en flèche dans une écluse !
Bref du coup moi le 360° au manche X-Y et puis un potard unique en haut à droite de ma radio pour les deux moteurs que je peux manipuler avec mon majeur tandis que mes index et pouces sont sur les sticks : ça me va parfaitement et je retrouve toutes les sensation de la manœuvre comme en vrai.
Pour Chrisdau, je suis désolé mais avec les courroies tu ne pourras sérieusement faire que du 30°/30° ce qui est largement suffisant pour la navigation dans le trèfle des Championnats de France. Pour le reste, du 180°/180° ..... pffffff ..... fait le si ça te plait mais ce sera d'une imprécision sans nom et une marche arrière idiote à devoir faire 350° à droite quand tu voudras faire 10° à gauche.
A+ Xtian
- Message n° 19
- Ptitbill
- Messages : 104
Date d'inscription : 18/02/2021
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 13:09
bonjour Xtian,
Merci pour toutes tes remarques.
Donc, pour bien faire, il faudrait faire des masques sur l'émetteur pour vérifier que les données reçues au récepteur soient cohérentes lorsque l'on suit une trajectoire précise ? Le mieux serait de faire une sorte de calibration en bougeant les manches dans tout les sens pour que l'électronique trouve ses marques.
Maintenant, si la gestion de la puissance sur le manche n'est pas utile... autant utiliser le montage Lapin/crono avec un masque (éventuellement) amovible.
Franck
Merci pour toutes tes remarques.
Donc, pour bien faire, il faudrait faire des masques sur l'émetteur pour vérifier que les données reçues au récepteur soient cohérentes lorsque l'on suit une trajectoire précise ? Le mieux serait de faire une sorte de calibration en bougeant les manches dans tout les sens pour que l'électronique trouve ses marques.
Maintenant, si la gestion de la puissance sur le manche n'est pas utile... autant utiliser le montage Lapin/crono avec un masque (éventuellement) amovible.
Franck
- Message n° 20
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 13:19

Donc, cette disposition ; les gaz sont sur les potards linéaires, avec une buté pour empécher de passer en arriere, ET SURTOUT la suppression du masque, Peut etre garder la couronne exterieure pour éviter "l' effet de patate" ?
Je valide le montage de Ptitbill , Chrisdau devra adopter ce montage, et aussi les autres qui voudront faire du ZDRIVE et que le principe rebutait.
Exploiter un ASD sans 360 degrés est absurbe ; Le 360 est l'essence meme du ZDRIVE : Asd comme le tracteur tug, c'est super simple de pilotage, d'une souplesse ,un pas de danse , une valse, quand tu a ton bateau en main . J'en ai bien profité avec AB POULIGUEN , de virevolter et translation au milieu des autres qui tournaient en rond, malgré le manque de fiabilité de mon montage ,mais a vitesse réduire, c'était super
Michel
- Message n° 21
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 14:29
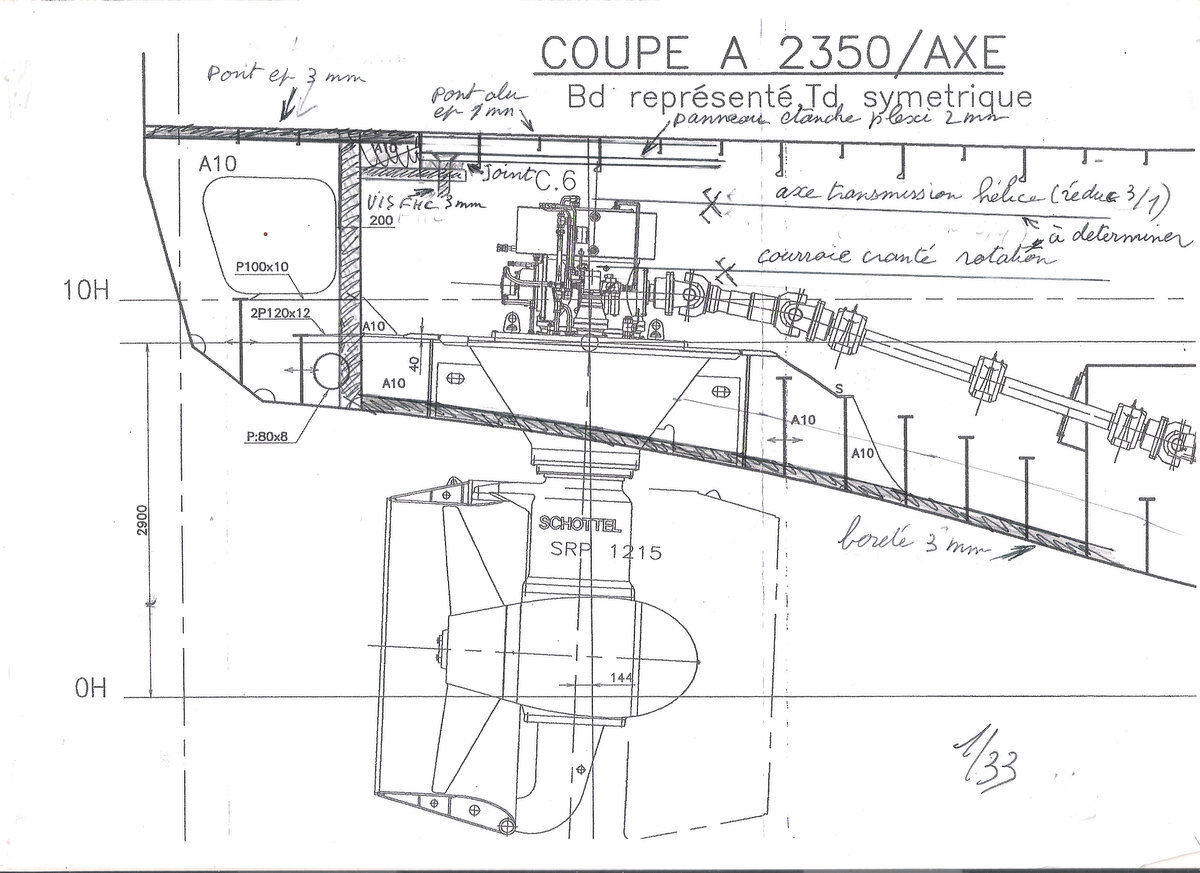
Voici ,un excellent tracteur zdrive pour mettre en application le controleur 360° de Ptitbill

Les vingt six plans de chantier en PDF a l' echelle du 1/33 et la centaine de photos de détails sont a votre disposition pour faire un beau modele, me contacter par MP
Michel

Les vingt six plans de chantier en PDF a l' echelle du 1/33 et la centaine de photos de détails sont a votre disposition pour faire un beau modele, me contacter par MP
Michel
- Message n° 22
- xtian29
- Messages : 1469
Date d'inscription : 04/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 15:18
@ Ptitbill :
Je ne comprend pas pourquoi les masques dont tu parles ? Peut-être qu'il y a une truc dans ce que j'ai dit qui prête à confusion ? et d'ailleurs Lapin parles de "patate" avec la couronne extérieure : ???
@ Lapin : L'effet patate n'est pas du tout pour le cercle formé par le X-Y et l'azimut. l'effet patate est pour le contrôle de la puissance moteur en fonction de l'éloignement du centre des manches X/Y pour le cas où l'on veut mettre la puissance via une poignée genre IMTH.
Tu penches de 45° le manche depuis la position verticale et puis là tu fais un cercle horizontal en restant avec cet angle à 45°. Le résultat du signal reçu n'est pas constant et reporté à la façon d'une équation de courbe en math sur un papier ça donne un patate là où théoriquement la courbe générée devrait être un cercle puisque éloignement théoriquement constant par rapport ou centre.
Pour revenir Ptitbill et ton masque, je pense que pour ton système il faut à minima des "yeux de panda" sur ton émetteur. J'ai appelé ça comme ça il y a une trentaine d'année pour la conduite des Voith et empêcher les manches de la radio d'aller dans les coins. Mes radios, qu'elles soient pour Voith ou propulsion azimutale ont des "yeux de panda" comme ça , c'est pas très impactant, contrairement aux systèmes Lapin et Crono/Lucien où le manche doit impérativement rester sur la couronne, il faut alors vraiment empêcher le manche de revenir au centre au risque de tout casser
Ici les yeux de panda sont juste posés, pour le Seapod ca ne pose aucun problème si le manche revient au centre, à priori si j'ai bien compris c'est aussi le cas pour ton système Ardino 360° et plus.

@ Lapin. Ton système de blocage marche arrière sur potard linéaire n'est pas utile si on utilise un ESC "avion" qui n'a pas de marche arrière.
Je ne suis absolument pas d'accord avec toi Lapin pour l'obligation du 360° si on fait un ASD. Pour nous qui sommes des Tug Lovers, oui bien sûr, on adore la manœuvre et on fait des remorqueurs pour ça.
Mais on est combien ? Une très large majorité des modélistes sont très très loin de tout ça. S'ils veulent un remorqueur moderne il n'y a quasiment plus de classiques avec juste des lignes d'arbres. Pour faire du modernes il faut faire un ASD mais pourquoi se lancer dans une usine à gaz et piloter en plus à l'envers : avec un ASD quand tu mets la barre a droite le canot vire à gauche.
Mais non, qu'ils fassent du 30°/30° et tout le monde est content pour faire des ronds dans l'eau avec un bateau moderne.
Pour preuve que la majorité des modélistes sont loin de tout ça, combien de modélistes avec deux lignes d'arbres classiques les équipent pour qu'elles puissent être dissociées et manœuvrer avec un moteur en avant et l'autre en arrière. Pas plus loin qu'il y a deux jours j'ai vu un France avec un safran surdimensionné et la gars explique que c'est pour mieux tourner dans le bassin ... Alors que s'il dissociait ces lignes d'arbres et il virerait sur lui même ! Non non le gars trouve ça compliqué et ça mange des voies de la radio ... Bin oui il en a besoin pour faire tourner les radars, allumer les loupiottes et faire de la fumée.
Non franchement le 360° ça n'a d'importance que pour nous qui avons une idée de ce que c'est que la manœuvre des remorqueurs. Les autres ils font des ronds dans l'eau.
Tiens, dernier exemple : un Smit Nederland, le gars l'équipe d'un propulseur d'étrave (il y en a pas dans la vraie vie) pour qu'il vire mieux, mais il commande les deux lignes d'arbres avec un seul variateur.
Franchement alors que Chridau est un excellent maquettiste c'est pas vraiment un navigateur (L'Astrolabe n'a jamais navigué), je pense que le meilleur conseil qu'on doit lui donner c'est de ne pas inventer une usine à gaz avec un montage "grille servo" puisque deux servo connectés à deux poulies superposées et solidaires 


Un système avec un servo, une courroie et un servo à 30°/30° c'est PARFAIT pour une navigation classique et un parcours tranquille entre les bouées du trèfle des Championnats de France.
PS Lapin : Ptitbill ne cherche pas un nouveau projet, il procrastine déjà assez sur son Bratt : le petit à droite
sur son Bratt : le petit à droite


A+ Xtian
Je ne comprend pas pourquoi les masques dont tu parles ? Peut-être qu'il y a une truc dans ce que j'ai dit qui prête à confusion ? et d'ailleurs Lapin parles de "patate" avec la couronne extérieure : ???
@ Lapin : L'effet patate n'est pas du tout pour le cercle formé par le X-Y et l'azimut. l'effet patate est pour le contrôle de la puissance moteur en fonction de l'éloignement du centre des manches X/Y pour le cas où l'on veut mettre la puissance via une poignée genre IMTH.
Tu penches de 45° le manche depuis la position verticale et puis là tu fais un cercle horizontal en restant avec cet angle à 45°. Le résultat du signal reçu n'est pas constant et reporté à la façon d'une équation de courbe en math sur un papier ça donne un patate là où théoriquement la courbe générée devrait être un cercle puisque éloignement théoriquement constant par rapport ou centre.
Pour revenir Ptitbill et ton masque, je pense que pour ton système il faut à minima des "yeux de panda" sur ton émetteur. J'ai appelé ça comme ça il y a une trentaine d'année pour la conduite des Voith et empêcher les manches de la radio d'aller dans les coins. Mes radios, qu'elles soient pour Voith ou propulsion azimutale ont des "yeux de panda" comme ça , c'est pas très impactant, contrairement aux systèmes Lapin et Crono/Lucien où le manche doit impérativement rester sur la couronne, il faut alors vraiment empêcher le manche de revenir au centre au risque de tout casser
Ici les yeux de panda sont juste posés, pour le Seapod ca ne pose aucun problème si le manche revient au centre, à priori si j'ai bien compris c'est aussi le cas pour ton système Ardino 360° et plus.
@ Lapin. Ton système de blocage marche arrière sur potard linéaire n'est pas utile si on utilise un ESC "avion" qui n'a pas de marche arrière.
Je ne suis absolument pas d'accord avec toi Lapin pour l'obligation du 360° si on fait un ASD. Pour nous qui sommes des Tug Lovers, oui bien sûr, on adore la manœuvre et on fait des remorqueurs pour ça.
Mais on est combien ? Une très large majorité des modélistes sont très très loin de tout ça. S'ils veulent un remorqueur moderne il n'y a quasiment plus de classiques avec juste des lignes d'arbres. Pour faire du modernes il faut faire un ASD mais pourquoi se lancer dans une usine à gaz et piloter en plus à l'envers : avec un ASD quand tu mets la barre a droite le canot vire à gauche.
Mais non, qu'ils fassent du 30°/30° et tout le monde est content pour faire des ronds dans l'eau avec un bateau moderne.
Pour preuve que la majorité des modélistes sont loin de tout ça, combien de modélistes avec deux lignes d'arbres classiques les équipent pour qu'elles puissent être dissociées et manœuvrer avec un moteur en avant et l'autre en arrière. Pas plus loin qu'il y a deux jours j'ai vu un France avec un safran surdimensionné et la gars explique que c'est pour mieux tourner dans le bassin ... Alors que s'il dissociait ces lignes d'arbres et il virerait sur lui même ! Non non le gars trouve ça compliqué et ça mange des voies de la radio ... Bin oui il en a besoin pour faire tourner les radars, allumer les loupiottes et faire de la fumée.
Non franchement le 360° ça n'a d'importance que pour nous qui avons une idée de ce que c'est que la manœuvre des remorqueurs. Les autres ils font des ronds dans l'eau.
Tiens, dernier exemple : un Smit Nederland, le gars l'équipe d'un propulseur d'étrave (il y en a pas dans la vraie vie) pour qu'il vire mieux, mais il commande les deux lignes d'arbres avec un seul variateur.
Franchement alors que Chridau est un excellent maquettiste c'est pas vraiment un navigateur (L'Astrolabe n'a jamais navigué), je pense que le meilleur conseil qu'on doit lui donner c'est de ne pas inventer une usine à gaz avec un montage "grille servo" puisque deux servo connectés à deux poulies superposées et solidaires
Un système avec un servo, une courroie et un servo à 30°/30° c'est PARFAIT pour une navigation classique et un parcours tranquille entre les bouées du trèfle des Championnats de France.
PS Lapin : Ptitbill ne cherche pas un nouveau projet, il procrastine déjà assez
sur son Bratt : le petit à droite A+ Xtian
- Message n° 23
 sismique76
sismique76- Messages : 574
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 15:29
Bonjour ,
Mon ASD est équipé du système seapod, et je pense que je pilote comme xtian; j'ai fait 2 rondelles pour que les manches aient le meme débattement et je me sers du major de la main droite pour ajuster la vitesse des 2 moteurs en meme temps. Comme j'ai laissé les ressorts sur les 2 manches si je lève les pousses les 2 Zdrive reviennent en position 0 donc marche avant .Je ne pense pas etre le seul à etre configuré de cette façon . Mais le système de p'tit bill me parait correct attention je ne suis qu'un néophyte .
sismique76


Mon ASD est équipé du système seapod, et je pense que je pilote comme xtian; j'ai fait 2 rondelles pour que les manches aient le meme débattement et je me sers du major de la main droite pour ajuster la vitesse des 2 moteurs en meme temps. Comme j'ai laissé les ressorts sur les 2 manches si je lève les pousses les 2 Zdrive reviennent en position 0 donc marche avant .Je ne pense pas etre le seul à etre configuré de cette façon . Mais le système de p'tit bill me parait correct attention je ne suis qu'un néophyte .
sismique76
- Message n° 24
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 15:50
Chaque moteur est quand meme indépendant Tu gere comme sur la deuxiéme photo, Parce que tu peux trés bien naviguer sur un seul moteur; Ce que je faisais souvent avec AB POULIGUEN

José, navigue sur un seul moteur ,celui de tribord , celui de babord est a l' arret , le zdrive dans l'axe

José, navigue sur un seul moteur ,celui de tribord , celui de babord est a l' arret , le zdrive dans l'axe
- Message n° 25
- Lapin44
- Messages : 939
Date d'inscription : 06/05/2020
Re: Réalisation d’un asservissement de Zdrives
Lun 18 Nov - 16:21
Xtian
a l'époque en 1999, je faisais avec ce que j'avais , j'ai découvert les variateurs pour avions en 2005 avec ATTURI et l'idée de jacques LEFLEUTER, Le phénomene "patate" ,je l'ai découvert avec les controleurs Kagelmacher, en 2010, manque de précision . Sinon ,la publicité pour les ETRETAT -HONFLEUR, c'est pour ceux qui serait intéressé. C'est vrai que nous ne sommes pas nombreux a faire de l'omnidirectionalite vraie, , Maintenant que nous avons un systeme 360 au point, il faut le vulgariser et l'encourager dans les revues Xtian ,tu sais faire de beaux articles.
Michel
a l'époque en 1999, je faisais avec ce que j'avais , j'ai découvert les variateurs pour avions en 2005 avec ATTURI et l'idée de jacques LEFLEUTER, Le phénomene "patate" ,je l'ai découvert avec les controleurs Kagelmacher, en 2010, manque de précision . Sinon ,la publicité pour les ETRETAT -HONFLEUR, c'est pour ceux qui serait intéressé. C'est vrai que nous ne sommes pas nombreux a faire de l'omnidirectionalite vraie, , Maintenant que nous avons un systeme 360 au point, il faut le vulgariser et l'encourager dans les revues Xtian ,tu sais faire de beaux articles.
Michel
Page 1 sur 2 • 1, 2
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum