
ASD CROISIC
+18
fabco
Galabrulefo
camerone
patdxfr
mavrik
Patrick82
Lapin44
Phil86
Jules 17
namornik
Goliath
DEUNS MAQUETTE
Wadone
crono91
totof-marie
xtian29
sismique76
chrisdau
22 participants
Page 15 sur 16 •  1 ... 9 ... 14, 15, 16
1 ... 9 ... 14, 15, 16 
- Message n° 351
 chrisdau
chrisdau- Messages : 240
Date d'inscription : 09/05/2020
 ASD CROISIC
ASD CROISIC
Lun 11 Nov - 15:25
Bonjour tous, je viens de comprendre que le systeme de lapin n'est pas symétrique , le systeme de lucien m'intéresse, la question est 180 degres et 225 degres par exemple ,les servos ne peuvent pas marcher 180 plus 180 c'est la petite différence du réglage des bras qui fais la différence , dans un premier temps pour faire naviguer le croisc je vais mettre des 90 ou 180 la différence de rotation viendra du nombre de crans des poulies de courroies, comme la platine des servos du croisic est démontable je pourrais prendre le principe de julien pour plus de faciliter de démontage, j'aime bien aussi la solution 90 90 on peu améliorer en fonction des crans poulie ou engrenage
amicalement chrisdau
amicalement chrisdau
- Message n° 352
 Lapin44
Lapin44- Messages : 940
Date d'inscription : 06/05/2020
Re: ASD CROISIC
Mar 12 Nov - 13:23
Bonjour chrisdau
Mon montage est parfaitement sysmétrique, longueurs des bras identiques . La position du pivot par rapport a l'axe du pignon ,correspond au débattement du palier: 0°- 45 ° ,et, en tenant compte de sa longueur, Voir la photo de mon épure en bois. Impératif ,les deux servos doivent etre obligatoirement a 90 ° l' un par rapport a l'autre Le montage de Crono, est parfaitement sysmétrique , la longueur des bielles est fonction de la position des servos., ET SURTOUT le calage des palonniers des servos est obligatoirement de 45 ° Un a zéro ,neutre et l'autre a 45 ° C'est le principe des bielles d'une locomotive a vapeur Et surtout les deux servos doivent fonctionner SIMULTANEMENT ,sur le meme manche , en X et en Y, ( et dans le bon sens)
Les servos correspondent aux pistons qui ont un mouvement alternatif ,et est transformé en mouvement circulaire aux roues par les bielles décalées de 45 degrés
Mon montage était basé sur le moteur en V , Le montage de Crono sur la locomotive a vapeur Et c'est ce montage que tu doit adopter ,moins encombrant, en largeur et en hauteur.
Michel
Mon montage est parfaitement sysmétrique, longueurs des bras identiques . La position du pivot par rapport a l'axe du pignon ,correspond au débattement du palier: 0°- 45 ° ,et, en tenant compte de sa longueur, Voir la photo de mon épure en bois. Impératif ,les deux servos doivent etre obligatoirement a 90 ° l' un par rapport a l'autre Le montage de Crono, est parfaitement sysmétrique , la longueur des bielles est fonction de la position des servos., ET SURTOUT le calage des palonniers des servos est obligatoirement de 45 ° Un a zéro ,neutre et l'autre a 45 ° C'est le principe des bielles d'une locomotive a vapeur Et surtout les deux servos doivent fonctionner SIMULTANEMENT ,sur le meme manche , en X et en Y, ( et dans le bon sens)
Les servos correspondent aux pistons qui ont un mouvement alternatif ,et est transformé en mouvement circulaire aux roues par les bielles décalées de 45 degrés
Mon montage était basé sur le moteur en V , Le montage de Crono sur la locomotive a vapeur Et c'est ce montage que tu doit adopter ,moins encombrant, en largeur et en hauteur.
Michel
- Message n° 353
 Ptitbill
Ptitbill- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Ven 15 Nov - 8:07
Bonjour à tous,
En suivant tout ce qui vient d'être dit précédemment, j'ai eu une idée qui pourrais, peut-être, faire passer le système d'orientation de Michel (à 2 servos) dans le XXIeme siècle ... J'essaie de tester ça ce weekend et je reviens vers vous dans la rubrique PROPULSION pour ne pas encombrer le fil de Chrisdau.
... J'essaie de tester ça ce weekend et je reviens vers vous dans la rubrique PROPULSION pour ne pas encombrer le fil de Chrisdau.
Franck
En suivant tout ce qui vient d'être dit précédemment, j'ai eu une idée qui pourrais, peut-être, faire passer le système d'orientation de Michel (à 2 servos) dans le XXIeme siècle
Franck
- Message n° 354
 xtian29
xtian29- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Ven 15 Nov - 9:38
Hello Franck 
Super ! Attention la barre est haute car le système Lapin est l'invention d'origine, une vingtaine d'années déjà, ensuite il y a eu la version améliorée par un japonais, puis encore une version améliorée par les frères Lucien/Crono elle-même de nouveau améliorée par les frères eux-mêmes. Cette dernière version est particulièrement efficace et fiable.
Hâte de voir à quoi pense Ptibill.
A+ Xtian
Super ! Attention la barre est haute car le système Lapin est l'invention d'origine, une vingtaine d'années déjà, ensuite il y a eu la version améliorée par un japonais, puis encore une version améliorée par les frères Lucien/Crono elle-même de nouveau améliorée par les frères eux-mêmes. Cette dernière version est particulièrement efficace et fiable.
Hâte de voir à quoi pense Ptibill.
A+ Xtian
- Message n° 355
- Lapin44
- Messages : 940
Date d'inscription : 06/05/2020
Re: ASD CROISIC
Ven 15 Nov - 13:28
bonjour Xtian et Pitbill
C'est vrai que j'ai pensé ce montage ,en 1998; A l'époque le FRANCIA ,futur ABEILLE POULGUEN , venait d'arriver a Saint Nazaire , a peine a quai ,j'étais a bord, découverte d' un Zdrive, ,récupéré les plans ,aprés leur passage a la Douane et hop en construction . Sans savoir le principe du zdrive, partant du principe qu'un manche de télécommande ,deux voies , qui actionne deux servos et observé que le déplacement du manche agissait sur les deux servos , L'idée m'est venue de profiter de ces déplacements combinés D' ou, mon montage , A l'époque c'était des radios basiques, j'étais tributaire du déplacement des palonniers; débattements qu'il fallait convertir en rayon sur le pignon primaire ,avec un minimum d'encombrement pour loger les ensembles a bord, C'était des tringleries ,avec chapes a rotules pour avions, je reglais la longueur , trop long ,je faisait un tour sur la chape ,trop court de quelques dixiemes , d'ou l'idée de laisser les servos libres pour compenser ces écarts, maintenant avec les radios modernes ,ordinateur, on peut régler ,pile poil ,la course des servos, plus de précision

Abeille Pouliguen encore aux couleurs de Rimorchiatori Ruiniti
Maintenant, les 360 ° de Crono et son Frére sont les seuls valables et a installer pour vos futurs ASD et tracteurs; Mon montage est dépassé,
Michel
C'est vrai que j'ai pensé ce montage ,en 1998; A l'époque le FRANCIA ,futur ABEILLE POULGUEN , venait d'arriver a Saint Nazaire , a peine a quai ,j'étais a bord, découverte d' un Zdrive, ,récupéré les plans ,aprés leur passage a la Douane et hop en construction . Sans savoir le principe du zdrive, partant du principe qu'un manche de télécommande ,deux voies , qui actionne deux servos et observé que le déplacement du manche agissait sur les deux servos , L'idée m'est venue de profiter de ces déplacements combinés D' ou, mon montage , A l'époque c'était des radios basiques, j'étais tributaire du déplacement des palonniers; débattements qu'il fallait convertir en rayon sur le pignon primaire ,avec un minimum d'encombrement pour loger les ensembles a bord, C'était des tringleries ,avec chapes a rotules pour avions, je reglais la longueur , trop long ,je faisait un tour sur la chape ,trop court de quelques dixiemes , d'ou l'idée de laisser les servos libres pour compenser ces écarts, maintenant avec les radios modernes ,ordinateur, on peut régler ,pile poil ,la course des servos, plus de précision

Abeille Pouliguen encore aux couleurs de Rimorchiatori Ruiniti
Maintenant, les 360 ° de Crono et son Frére sont les seuls valables et a installer pour vos futurs ASD et tracteurs; Mon montage est dépassé,
Michel
- Message n° 356
- Ptitbill
- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Ven 15 Nov - 17:13
Bonsoir,
En fait, je ne compte pas changer le système mécanique inventé par Lapin et amélioré par Crono. Je viens en parallèle...
Franck
En fait, je ne compte pas changer le système mécanique inventé par Lapin et amélioré par Crono. Je viens en parallèle...
Franck
- Message n° 357
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Ven 15 Nov - 18:34
Hello
Ah bin oui ce serait dommage de réinventer le Lapin !
Eh eh ... on attendra la fin du week-end
A+ Xtian
Ah bin oui ce serait dommage de réinventer le Lapin !
Eh eh ... on attendra la fin du week-end
A+ Xtian
- Message n° 358
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
ASD CROISIC
Jeu 21 Nov - 10:34
bonjour tous , je viens de recevoir un nouveau servos utilisé pour la robotique ,voitures et avions, je viens de faire un premier essais avec ce type de servos 360 35 kgs , j'ai utilisé un testeur de servos et de variateurs que vous pouvez trouver sur amazon , apres essais j'ai trouvé le neutre, sur la position reglage droite gauche le 360 fonctionne dans les deux sens avec arret au centre
je vous donne la réference
https://fr.aliexpress.com/item/4000212490243.html?spm=a2g0o.order_detail.order_detail_item.4.70217d56cizoUQ&gatewayAdapt=glo2fra
ce n'est qu'un essais vous pouvez vérifier vous même
amicalement chrisdau
je vous donne la réference
https://fr.aliexpress.com/item/4000212490243.html?spm=a2g0o.order_detail.order_detail_item.4.70217d56cizoUQ&gatewayAdapt=glo2fra
ce n'est qu'un essais vous pouvez vérifier vous même
amicalement chrisdau
- Message n° 359
- Lapin44
- Messages : 940
Date d'inscription : 06/05/2020
Re: ASD CROISIC
Jeu 21 Nov - 11:26
Bonjour Chrisdau
Si le servo tourne vraiment sur 360 ,sans arret, Je suppose qu'il est sur un manche, et a une électronique intégrée pour faire le tour complet sans arret
Donc , cette carte electronique qui date de 2010 ,est miniaturisée et intégrée dans un servo de dimensions standards. Si c'est le cas, tu peux entrainer le zdrive avec une courroie crantée. Et la puissance moteur est sur une voie a part.
Michel
Si le servo tourne vraiment sur 360 ,sans arret, Je suppose qu'il est sur un manche, et a une électronique intégrée pour faire le tour complet sans arret

Donc , cette carte electronique qui date de 2010 ,est miniaturisée et intégrée dans un servo de dimensions standards. Si c'est le cas, tu peux entrainer le zdrive avec une courroie crantée. Et la puissance moteur est sur une voie a part.
Michel
- Message n° 360
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
ASD CROISIC
Jeu 21 Nov - 11:57
Bonjour
pour l'essai avec le testeur de servo il y une position neutre , tu tourne a gauche ou a droite le servo tourne en continu a droite ou a gauche avec une vitesse en proportion , sur une radio avec le manche a ressort le neutre reviens automatiquement , pour le testeur je suis obliger de revenir sur le neutre il y a une barre sur le bouton, il y trois réglages sur le testeur gauche droite automatique, neutre , et enfin gauche droite et arret
amicalement
pour l'essai avec le testeur de servo il y une position neutre , tu tourne a gauche ou a droite le servo tourne en continu a droite ou a gauche avec une vitesse en proportion , sur une radio avec le manche a ressort le neutre reviens automatiquement , pour le testeur je suis obliger de revenir sur le neutre il y a une barre sur le bouton, il y trois réglages sur le testeur gauche droite automatique, neutre , et enfin gauche droite et arret
amicalement
- Message n° 361
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
Re: ASD CROISIC
Jeu 21 Nov - 12:05
Bonjour
pour l'essai avec le testeur de servo il y une position neutre , tu tourne a gauche ou a droite le servo tourne en continu a droite ou a gauche avec une vitesse en proportion , sur une radio avec le manche a ressort le neutre reviens automatiquement , pour le testeur je suis obliger de revenir sur le neutre il y a une barre sur le bouton, il y trois réglages sur le testeur gauche droite automatique, neutre , et enfin gauche droite et arret
amicalement[ christian
je viens de voir que les chinois n'ont pas hésité a utilisé des courroies sur les sservos
https://www.oceanworkscale.com/product/z-peller-azimuth-thruster-z-drive-propulsion-combo-set-40mm-reinforce-nylon/
pour l'essai avec le testeur de servo il y une position neutre , tu tourne a gauche ou a droite le servo tourne en continu a droite ou a gauche avec une vitesse en proportion , sur une radio avec le manche a ressort le neutre reviens automatiquement , pour le testeur je suis obliger de revenir sur le neutre il y a une barre sur le bouton, il y trois réglages sur le testeur gauche droite automatique, neutre , et enfin gauche droite et arret
amicalement[ christian
je viens de voir que les chinois n'ont pas hésité a utilisé des courroies sur les sservos
https://www.oceanworkscale.com/product/z-peller-azimuth-thruster-z-drive-propulsion-combo-set-40mm-reinforce-nylon/
- Message n° 362
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Jeu 21 Nov - 12:53
Hello
Je ne vois absolument aucun intérêt à l'utilisation d'un servo à 360° pour un système de propulsion azimutal. Oui pour de la robotique et une animation genre grue ou treuil mais pas pour un propulseur omnidirectionnel.
- tu fais quoi quand tu arrives à 180° dans un sens et que tu veux aller un peu plus loin ?
- tu as quelle précision sur ton manche de radio qui a 15° de battement équivalent au 180° servo ?
Bien sur car ça n'est pas l'utilisation de courroies qui en cause ici, courroies ou couronnes d'engrenage c'est kif-kif : juste plus moins de tension et parfois plus précis pour une couronne d'engrenage
Chridau : la courroie était problématique et toujours impossible d'utilisation pour le contrôle via 2 servos à 90° (système Lapin et suivants)
Pour info Lapin, avec les SEAPOD de Patrick j'utilise depuis 5 ans sans problème des servo tout à fait normaux avec butées et potards dégagés.

A+ Xtian
Je ne vois absolument aucun intérêt à l'utilisation d'un servo à 360° pour un système de propulsion azimutal. Oui pour de la robotique et une animation genre grue ou treuil mais pas pour un propulseur omnidirectionnel.
- tu fais quoi quand tu arrives à 180° dans un sens et que tu veux aller un peu plus loin ?
- tu as quelle précision sur ton manche de radio qui a 15° de battement équivalent au 180° servo ?
Chrisdau a écrit:Je viens de voir que les chinois n'ont pas hésité a utilisé des courroies sur les sservos
Bien sur car ça n'est pas l'utilisation de courroies qui en cause ici, courroies ou couronnes d'engrenage c'est kif-kif : juste plus moins de tension et parfois plus précis pour une couronne d'engrenage
Chridau : la courroie était problématique et toujours impossible d'utilisation pour le contrôle via 2 servos à 90° (système Lapin et suivants)
Pour info Lapin, avec les SEAPOD de Patrick j'utilise depuis 5 ans sans problème des servo tout à fait normaux avec butées et potards dégagés.
A+ Xtian
- Message n° 363
- Ptitbill
- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Jeu 21 Nov - 14:58
Bonjour Xtian,
Sur ton seapod, tu as un capteur quelque part pour connaitre la position des Zdrives par rapport à l'axe du bateau ?
Franck
Sur ton seapod, tu as un capteur quelque part pour connaitre la position des Zdrives par rapport à l'axe du bateau ?
Franck
- Message n° 364
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Jeu 21 Nov - 15:35
Hello Ptitbill
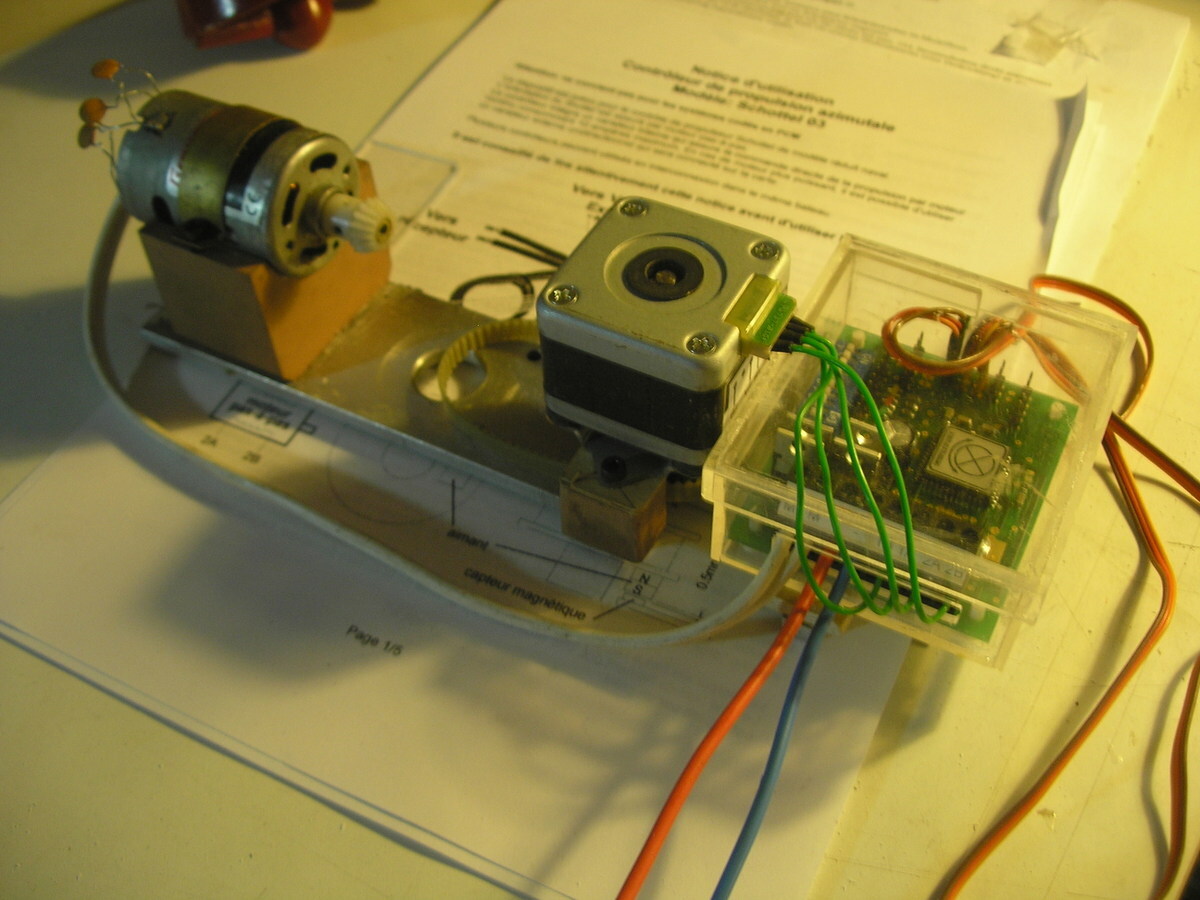
Oui, sur la photo que j'ai présenté il n'y a que la partie mécanique avec propulseur/moteur de propulsion (Brushless vertical entraînement courroie) et moteur de direction (servo sans butée entraînement roue d'engrenage)
Pour la partie commande il y a la platine Seapod et son capteur (bleu) que moi j'ai monté en coaxial sur l'axe roue d'engrenage d'entraînement en rotation par le servo invisible ici car il en dessous. On voit ici aussi l'ESC "avion" car un seul de rotation moteur (sans marche arrière)

Et la carte Seapod - avec son alimentation 12V, arrivée info capteur de position, sortie alimentation servo position - arrivées des deux info radio X et Y depuis le récepteur radio
Pour le capteur de position il y a un zérotage à faire en mettant les propulseurs sur zéro et en appuyant sur le bouton noir au centre de la carte Seapod.

A+ Xtian
Oui, sur la photo que j'ai présenté il n'y a que la partie mécanique avec propulseur/moteur de propulsion (Brushless vertical entraînement courroie) et moteur de direction (servo sans butée entraînement roue d'engrenage)
Pour la partie commande il y a la platine Seapod et son capteur (bleu) que moi j'ai monté en coaxial sur l'axe roue d'engrenage d'entraînement en rotation par le servo invisible ici car il en dessous. On voit ici aussi l'ESC "avion" car un seul de rotation moteur (sans marche arrière)
Et la carte Seapod - avec son alimentation 12V, arrivée info capteur de position, sortie alimentation servo position - arrivées des deux info radio X et Y depuis le récepteur radio
Pour le capteur de position il y a un zérotage à faire en mettant les propulseurs sur zéro et en appuyant sur le bouton noir au centre de la carte Seapod.
A+ Xtian
- Message n° 365
- Ptitbill
- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Jeu 21 Nov - 15:49
Je me disais bien qu'il en manquait un bout... on retombe sur la solution moteurs pas a pas pour ce qui est de la complexité et du prix... Le SEAPOD est juste un peu plus compact que ma première solution.
Je me remets donc à mes deux servos !
Franck
Je me remets donc à mes deux servos !
Franck
- Message n° 366
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Jeu 21 Nov - 16:03
Non, il n'y a pas de moteur pas à pas ici (qui coûte un os) mais il y a un simple servo standard.
- Message n° 367
- Ptitbill
- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Jeu 21 Nov - 16:05
Oui mais comme ton potentiomètre coute à peu près le même prix que le moteur pas a pas...
- Message n° 368
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Jeu 21 Nov - 18:03
@ Ptitbill
On me dit par ailleurs qu'un moteur pas à pas est en boucle ouverte. Il sait où il va mais il ne sait pas d’où il vient, et qu'il lui faut en plus un capteur de position, par exemple un potentiomètre comme ce bleu.
On ne pourrait donc pas comparer le Seapod, son servo standard et potentiomètre avec un système moteur pas à pas et son potentiomètre aussi.
Cependant à part du moment où l'on exclu le contrôle de puissance des moteurs du manche x/y en mettant les deux moteurs sur un seul potard à part. Alors ton système Adino et deux servo à 90° x/y est une belle option.
A+
On me dit par ailleurs qu'un moteur pas à pas est en boucle ouverte. Il sait où il va mais il ne sait pas d’où il vient, et qu'il lui faut en plus un capteur de position, par exemple un potentiomètre comme ce bleu.
On ne pourrait donc pas comparer le Seapod, son servo standard et potentiomètre avec un système moteur pas à pas et son potentiomètre aussi.
Cependant à part du moment où l'on exclu le contrôle de puissance des moteurs du manche x/y en mettant les deux moteurs sur un seul potard à part. Alors ton système Adino et deux servo à 90° x/y est une belle option.
A+
- Message n° 369
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
ASD CROISIC
Sam 23 Nov - 10:44
Bonjour tous , je viens de recevoir le travel tuner, , c'es un regulateur de servos, apres quelques essais un servo normal de 90 se transforme en 180, avec le servo de 360 il est pas facile de determiner le point mort , il n'est pas stable, maintenant j'ai plusieurs possibilité pour la direction pour le croisic avec utilisation d'engrenages : une option deux servos 180 et engrenage au centre pour la direction, servos 180 et travel tuner pour le 360, servo 240 ou 300 et travel tuner avec reglage fin pour avoir le neutre et le 360 ° , l'avantage d'un seul servo c'est le manche horizontal pour la direction et le vertical pour le regulateur de vitesse, avec les deux servos c'est la rotation continue avec le neutre mais c'est le même principe que crono et julien, donc trois engrenages pas cher et simple avec des engrenages symétrique
amicalement chrisdau

aussi une question pour xtian comment avez vous fixer les engrenages sur le servo pour le seapod
amicalement chrisdau
aussi une question pour xtian comment avez vous fixer les engrenages sur le servo pour le seapod
- Message n° 370
 sismique76
sismique76- Messages : 574
Date d'inscription : 06/05/2020
Re: ASD CROISIC
Sam 23 Nov - 11:27
Bonjour chisdau ,
Voici une photo ou l'on voit le pignon fixé sous la croix rouge , c'est rudimentaire mais sa tourne rond .
cordialement
sismique76

Voici une photo ou l'on voit le pignon fixé sous la croix rouge , c'est rudimentaire mais sa tourne rond .
cordialement
sismique76
- Message n° 371
- Ptitbill
- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Sam 23 Nov - 11:30
Bonjour Chrisdau,
Alors là, je suis perdu. Soit je n'ai pas compris ce que tu veux faire. Soit c'est toi qui n'a pas compris le fonctionnement du 360° et plus.
Tu penses utiliser le SEAPOD ?
Franck
Alors là, je suis perdu. Soit je n'ai pas compris ce que tu veux faire. Soit c'est toi qui n'a pas compris le fonctionnement du 360° et plus.
Tu penses utiliser le SEAPOD ?
Franck
- Message n° 372
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Sam 23 Nov - 12:21
Hello
@ Ptitbill : Si ça peut te rassurer, je ne comprend rien non plus aux options proposées par Chridau avec ses servo à 180 ° et ses travel turner, et puis c'est vraiment n'avoir jamais manœuvré un ASD et être un doux rêveur que de penser faire la direction à 180° voir même à 360° sur le stick horizontal et puis la puissance en stick vertical.
Sinon je pense comme toi qu'il n'a jamais compris le 360° et plus
@ Sismique : merci pour la photo de ton installation qui est somme toute similaire la mienne hormis la position du potentiomètre de position qui est monté sur une roue d'engrenage dédiée -
J'ai fait un montage un peu plus compliqué en mettant le potentiomètre par dessus en coaxial pour une raison de place et d'accès - Mais sur un bateau en projet qui sera un tracteur azimutal (pas un ASD), er donc sans problème ni d'accès ni de place puisque les propulseurs seront sous la cabine, alors je pense faire exactement comme toi. C'est encore au stade du projet même si j'ai déjà les propulseurs et les Seapod.
A+ Xtian
@ Ptitbill : Si ça peut te rassurer, je ne comprend rien non plus aux options proposées par Chridau avec ses servo à 180 ° et ses travel turner, et puis c'est vraiment n'avoir jamais manœuvré un ASD et être un doux rêveur que de penser faire la direction à 180° voir même à 360° sur le stick horizontal et puis la puissance en stick vertical.
Sinon je pense comme toi qu'il n'a jamais compris le 360° et plus
@ Sismique : merci pour la photo de ton installation qui est somme toute similaire la mienne hormis la position du potentiomètre de position qui est monté sur une roue d'engrenage dédiée -
J'ai fait un montage un peu plus compliqué en mettant le potentiomètre par dessus en coaxial pour une raison de place et d'accès - Mais sur un bateau en projet qui sera un tracteur azimutal (pas un ASD), er donc sans problème ni d'accès ni de place puisque les propulseurs seront sous la cabine, alors je pense faire exactement comme toi. C'est encore au stade du projet même si j'ai déjà les propulseurs et les Seapod.
A+ Xtian
- Message n° 373
- chrisdau
- Messages : 240
Date d'inscription : 09/05/2020
ASD CROISIC
Sam 23 Nov - 12:59
Bonjour tous, mon idée c'est le principe de crono et julien ,comme sur la photo de sismique je part d'un engrenage servo 180 a droite de l'engrenage de direction au centre, ensuite l'autre engrenage servo 180 a gauche en sens inverse ,avec un seul manche pour les deux voies , je remplace les tringles par des engrenages directement sur les servos
amicalement christian
amicalement christian
- Message n° 374
- xtian29
- Messages : 1475
Date d'inscription : 04/05/2020
Re: ASD CROISIC
Sam 23 Nov - 14:03
Dit comme ça c'est un juste un méli-mélo sans fondement - Partir de l'idée de Crono et Lucien (c'est pas Julien) mais avec des servo à 180° et bien ca ne peut pas marcher !!!
Et puis il faut être bien clair : remplacer les tringles pas des engrenages sur un principe à deux servo qui reprennent chacun leur tour la rotation : ça ne peut pas marcher non plus
quand au montage Sismique, qui est identique au mien, il n'a rien strictement rien a voir avec un système mécanique sur deux servos. C'est un système de conduite électronique basé sur calcul d'abscisse et d'ordonnée pour retrouver le cercle et les 360°
Maintenant tu sembles avoir ton idée, va-y et on verra au résultat ...
- Message n° 375
- Ptitbill
- Messages : 110
Date d'inscription : 18/02/2021
Re: ASD CROISIC
Sam 23 Nov - 20:40
Bonsoir Chrisdau,
Je suis d’accord avec Xtian. Je pense que tu mélanges les différents systèmes d’orientation des Zdrives. Tu devrais relire tout ce qui à été dit ou montré sur ces systèmes avec attention.
Il y a grosso modo 3 systèmes différents :
1- Le Zdrive est connecté comme un gouvernail classique par intermédiaire d’une tringle (ou d’un couple de pignons).
En poussant le manche de la radio à droite ou à gauche, le Zdrive tourne, vers la droite ou la gauche, de 30°,45°...180° selon le modèle de servo et les longueurs de palonniers (ou les rapport de pignons).
Dans ce cas, il faut obligatoirement une marche avant et arrière.
Le pilotage est semblable à celui d’un bateau classique.
Mais voilà, les bateaux munis de zdrives ne sont pas manœuvrés comme un bateau à gouvernail.
Un Zdrive peut faire plusieurs tours d’affilée dans un même sens, puis repartir dans l’autre à n’importe quel moment. D’où le 360° ET PLUS.
Pour le commander, il faut une sorte de gros bouton qui tourne en synchroncité avec le zdrive sous le bateau. Si le repère du « bouton » est pointé vers l’avant, le zdrive va s’orienter aussi vers l’avant… et le bateau va avancer (car, comme le zdrive peut être orienté à 360°, il n’y a pas besoin de marche arrière).
2- L’idée de Lapin a été d’utiliser les deux voies d’un émetteur et de faire un « masque » sur le manche pour le faire tourner parfaitement rond.
Dans le bateau, il y a deux servos standards (90°) par Zdrive qui reproduisent le mouvement en cercle du manche.
En regardant la video, on constate que les biellettes passent au dessus de l’axe vertical du zdrive. D’où l’idée d’ajouter un couple de pignon pour se décaler et ne pas faire de nœud avec la transmission du moteur.
Crono et Lucien ont eu l’idée de connecter un pignon par servo pour pouvoir les mettre cote à cote et gagner de la place par rapport au montage à 90° de Lapin. Mais cela ne change rien au principe de base !
Sans le masque sur l’émetteur pour que cela tourne rond… Ça ne marche pas !
Si les servos ont un débattement différent de -45°/+45° … Ça ne marche pas !
En remplaçant les biellettes par des courroies … Ça ne marche pas !
3- Sur le montage de sismique, de Xtian ou le premier que j’ai développé il y a de l'électronique en plus !
Il y a un moteur (servo modifié, moteur pas à pas) qui fait tourner le zdrive dans les deux sens et sans arrêt.
Pour que le moteur sache quelle est la position du Zdrive par rapport à l’axe du bateau, il est couplé à un capteur de position (potentiomètre, capteur de rotation..)
Enfin, pour lier le tout, il faut une « intelligence » électronique ou informatique qui analyse la position du manche sur la radio pour faire correspondre la position du Zdrive sous le bateau.

Voilà. J’espère avoir correctement synthétisé ce qui se fait à l’heure actuelle et que cela te permettra d’y voir plus clair.
Amicalement
Franck
Je suis d’accord avec Xtian. Je pense que tu mélanges les différents systèmes d’orientation des Zdrives. Tu devrais relire tout ce qui à été dit ou montré sur ces systèmes avec attention.
Il y a grosso modo 3 systèmes différents :
1- Le Zdrive est connecté comme un gouvernail classique par intermédiaire d’une tringle (ou d’un couple de pignons).
En poussant le manche de la radio à droite ou à gauche, le Zdrive tourne, vers la droite ou la gauche, de 30°,45°...180° selon le modèle de servo et les longueurs de palonniers (ou les rapport de pignons).
Dans ce cas, il faut obligatoirement une marche avant et arrière.
Le pilotage est semblable à celui d’un bateau classique.
Mais voilà, les bateaux munis de zdrives ne sont pas manœuvrés comme un bateau à gouvernail.
Un Zdrive peut faire plusieurs tours d’affilée dans un même sens, puis repartir dans l’autre à n’importe quel moment. D’où le 360° ET PLUS.
Pour le commander, il faut une sorte de gros bouton qui tourne en synchroncité avec le zdrive sous le bateau. Si le repère du « bouton » est pointé vers l’avant, le zdrive va s’orienter aussi vers l’avant… et le bateau va avancer (car, comme le zdrive peut être orienté à 360°, il n’y a pas besoin de marche arrière).
2- L’idée de Lapin a été d’utiliser les deux voies d’un émetteur et de faire un « masque » sur le manche pour le faire tourner parfaitement rond.
Dans le bateau, il y a deux servos standards (90°) par Zdrive qui reproduisent le mouvement en cercle du manche.
En regardant la video, on constate que les biellettes passent au dessus de l’axe vertical du zdrive. D’où l’idée d’ajouter un couple de pignon pour se décaler et ne pas faire de nœud avec la transmission du moteur.
Crono et Lucien ont eu l’idée de connecter un pignon par servo pour pouvoir les mettre cote à cote et gagner de la place par rapport au montage à 90° de Lapin. Mais cela ne change rien au principe de base !
Sans le masque sur l’émetteur pour que cela tourne rond… Ça ne marche pas !
Si les servos ont un débattement différent de -45°/+45° … Ça ne marche pas !
En remplaçant les biellettes par des courroies … Ça ne marche pas !
3- Sur le montage de sismique, de Xtian ou le premier que j’ai développé il y a de l'électronique en plus !
Il y a un moteur (servo modifié, moteur pas à pas) qui fait tourner le zdrive dans les deux sens et sans arrêt.
Pour que le moteur sache quelle est la position du Zdrive par rapport à l’axe du bateau, il est couplé à un capteur de position (potentiomètre, capteur de rotation..)
Enfin, pour lier le tout, il faut une « intelligence » électronique ou informatique qui analyse la position du manche sur la radio pour faire correspondre la position du Zdrive sous le bateau.
Voilà. J’espère avoir correctement synthétisé ce qui se fait à l’heure actuelle et que cela te permettra d’y voir plus clair.
Amicalement
Franck
Page 15 sur 16 • 1 ... 9 ... 14, 15, 16
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum